 English
English
 Chinese
Chinese
 German
German
 Spanish
Spanish
 Korean
Korean


安定したプラットフォーム
スタビライズド・プラットフォームは、INSとは独立して回転するプラットフォームを安定させるために、実際に回転する機械式ジャイロスコープを使用する。そのため、慣性航法システムが回転しても、その中の安定化プラットフォームは回転しません。このようにして、システムはその方位を学習し、加速度計からの測定値を利用することができる。このタイプのシステムの欠点は、ジンバル・ロック ( シャワルマ を参照)、高いコストと複雑さである。
ストラップダウン・ナビゲーター
対照的に、ストラップダウン・ナビゲーター内のセンサーはINSから独立して動くことはない。言うなれば、ストラップで固定されているのだ。これにより、安定化プラットフォームに関連する多くの問題が克服され、慣性航法システムがより多くの人々に手頃な価格で提供されるようになった主な理由です。スタビライズド・プラットフォーム内の回転する機械式ジャイロとは異なり、ストラップダウン・ナビゲータ内で使用されるジャイロは一般的にMEMS(マイクロエレクトロメカニカル・システム)であり、可動部分がないように見える。実際、ジャイロというより角速度センサーと考えた方がいい。
では、INSはどのように機能するのか?
3D空間でのナビゲーションに必要な測定値を取得するため、慣性センサーの軸は互いに直角になるように配置されている。言い換えれば、各軸は他の2軸に対して90°の角度をなしている(下図)。

IMUフレーム
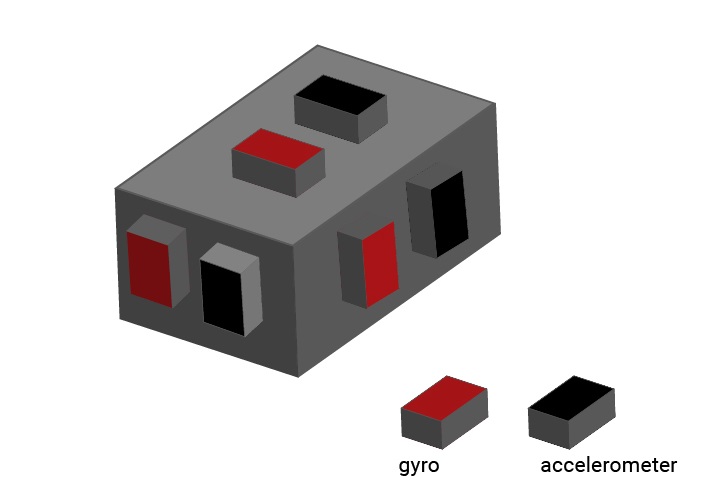
この画像は、慣性航法システムが動きと姿勢を測定するために使用する3つの軸(xyz)を示している。INS内の軸の位置は固定されているため、軸はINSとともに回転する。各軸は両方向を測定し、画像内の矢印はどちらの方向を正として読み取るかを示している。例えば
- INSが緑の矢印の方向に加速すれば、Y軸は正の加速度を示す。
- INSが反対方向に加速すれば、Y軸に沿って負の加速度が見られる。
各軸の角速度も測定される。
- もしINSが円形の赤い矢印で示されたように回転すれば、X軸ジャイロは正の値を示すだろう。
- もしINSが逆方向に回転すれば、X軸ジャイロの値はマイナスになる。
x軸、y軸、z軸に沿って(そしてz軸について)計測を行うことで、ナビゲーション・コンピュータはどのように移動し回転しているかを理解することができます。IMUのフレーム画像では、当社製品のxyz軸がどのように配置されているかがよくわかります。また、x軸ジャイロがどのように角速度を測定しているかを示す円形の矢印も見ることができます。
各矢印は一方向を指しているが、ジャイロと加速度センサーは各軸に沿って、あるいは各軸について両方向に計測していることを指摘しておく。矢印は、センサーが正の動きとみなす方向を示しているだけです。つまり、製品が(青い矢印の方向に)下に加速した場合、z軸加速度計は正の値を示し、製品が上に加速した場合、z軸加速度計は負の値を示します。ここで重要なことは を基準としている。


