 English
English
 German
German
 Spanish
Spanish
 Japanese
Japanese
 Korean
Korean


稳定平台
稳定平台使用真正的旋转机械陀螺仪来稳定平台,而平台的旋转与惯性导航系统无关。因此,当惯性导航系统旋转时,其内部的稳定平台不会旋转。这样,系统就能了解自己的方向,并利用加速度计的测量结果。这种系统的缺点是万向节锁定(见 陀螺仪 的全面解释)、高成本和复杂性。
背带式导航仪
相比之下,捆绑式导航仪内的传感器不能独立于导航仪移动。可以说,它们是被捆绑在一起的。这就克服了与稳定平台相关的许多问题,也是现在越来越多的人能够负担得起惯性导航系统的主要原因。与稳定平台内旋转的机械陀螺仪不同,捆绑式导航仪内使用的陀螺仪通常是 MEMS(微机电系统),似乎没有任何活动部件。事实上,最好将它们视为角速率传感器,而不是陀螺仪,尽管它们通常被称为角速率传感器。
那么移民归化局是如何工作的呢?
为了获取三维空间导航所需的测量数据,惯性传感器的轴线是以相互垂直的方式布置的。换句话说,每个轴都与其他两个轴成 90°(如下图所示)。

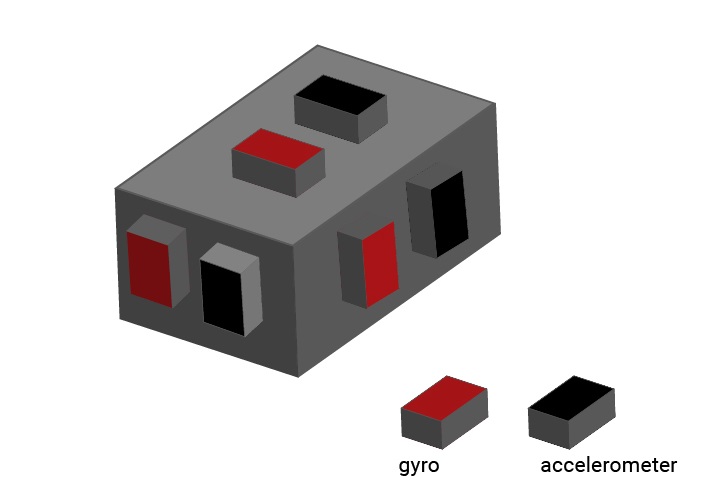
IMU 框架
该图显示了惯性导航系统用于测量运动和方向的三个轴(xyz)。这些轴在惯性导航系统中的位置是固定的,因此它们会随着惯性导航系统旋转。每个轴都可以测量两个方向--图像中的箭头表示哪个方向读数为正。例如
- 如果 INS 向绿色箭头方向加速,Y 轴将显示正加速度。
- 如果 INS 的加速度方向相反,我们就会看到沿 y 轴的负加速度。
同时还测量每个轴的角速度。
- 如果 INS 按照红色圆形箭头所示的方向旋转,我们就会在 X 轴陀螺仪上看到正读数。
- 如果 INS 朝相反方向旋转,X 轴陀螺仪上就会出现负值。
通过沿(和围绕)X、Y 和 Z 轴进行测量,导航计算机可以了解其移动和旋转情况。在 IMU 框架图中,您可以清楚地看到测量 xyz 轴是如何布置在我们的一款产品上的。您还可以看到一个圆形箭头,显示 x 轴陀螺仪如何测量角速度。
值得注意的是,虽然每个箭头都指向一个方向,但陀螺仪和加速度计仍然沿着每个轴或围绕每个轴进行双向测量。箭头只是表示传感器将哪个方向视为正向运动。因此,如果产品向下加速(蓝色箭头所指方向),z 轴加速度计将显示正值;如果产品向上加速,z 轴加速度计将显示负值。这里的一个重要考虑因素是 参照系。


