 Chinese
Chinese
 German
German
 Spanish
Spanish
 Japanese
Japanese
 Korean
Korean

From Data Capture to Competitive Edge
When you’re mapping complex environments you’re fighting a battle on two fronts. Your clients demand perfect data, as accurate as possible, and your bottom line demands that you work as efficiently as possible.
The pursuit of georeferencing perfection can kill efficiency, and leads to missed deadlines and cost overruns. But cutting corners to save time would destroy the accuracy, and credibility that your entire professional reputation is built on.
In short, you need a way of collecting positioning data for georeferencing that’s
- Accurate
- Reliable
- Works right the first time
At the same time, you need to streamline your back office work to turn that raw data into a highly precise georeferenced point cloud (or other kind of survey if you aren’t using LiDAR).
The truth is, Ground Control Points and even basic GNSS/INS systems just can’t keep up with these dual pressures anymore.
In this blog, we’re showcasing how OXTS GNSS/INS devices help you manage the conflicting pressures of georeferencing work, through specialised features designed with surveyors like you in mind. They’re accessed by activating feature codes on your device – so if you are an OXTS customer interested in levelling up your georeferencing process, get in touch with us today.
Getting data you can trust
Reliable fieldwork is the foundation upon which your entire final deliverable is built. Although post-processing plays a vital role in optimising your data, errors during the survey process can affect the data to the point where there’s nothing to do but re-survey – a costly and time-consuming misstep.
Our hardware and georeferencing features are designed to make sure the data you collect in the field is rock-solid from the start, building a foundation of integrity for your entire project.
Sync every sensor with PTP/GPTP
Direct georeferencing is simple in theory: for every single point the LiDAR sees, you need to know exactly where the sensor was and how it was oriented at that exact point in time. This is only possible if the clock on your INS and the clock on your LiDAR are as close to perfectly in sync as possible.
If they’re not, your point cloud will end up distorted.
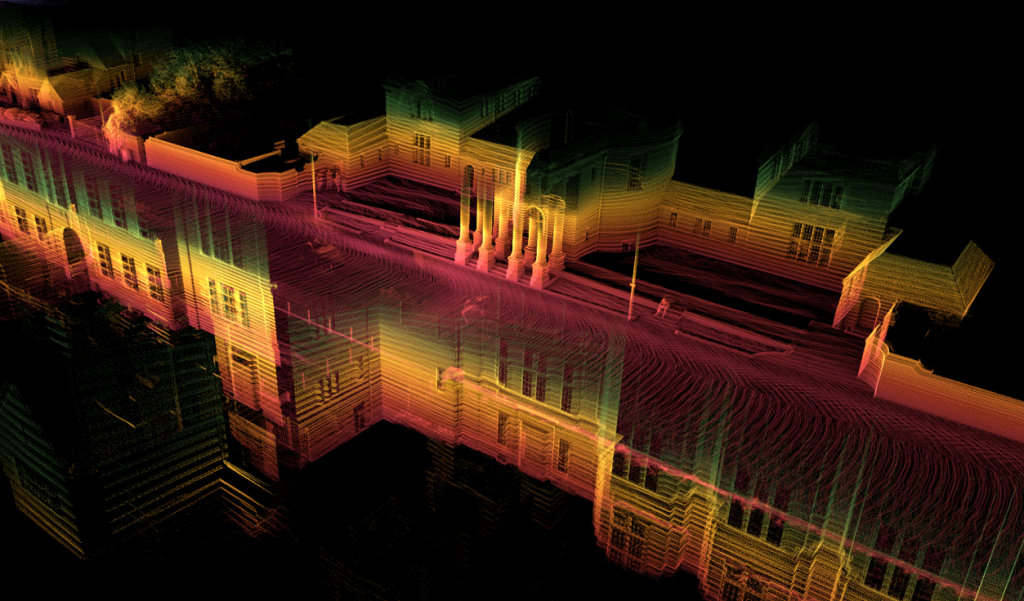
A timing error of just a few milliseconds can cause a survey device to be metres away from its true position, stretching and shearing your final point cloud into a blurry, unusable mess. Imagine scanning a building as you drive past. If the timing is off, the front of the building will appear stretched or compressed, and straight lines will become warped and jagged.
Our PTP/gPTP synchronisation feature makes this easy. It uses a standard network protocol to make sure all your sensors are running on the same, super-accurate time, often with sub-microsecond precision.
It turns your entire sensor suite into a single, cohesive instrument operating on one unified timeline. It’s the critical link that ties the “where” (from the GNSS/INS) to the “what” (from the LiDAR), and it’s an absolute must-have for any serious mobile mapping setup.

Stay accurate in the urban jungle with gx/ix
A lot of the most valuable mapping projects are in the heart of bustling cities, where tall buildings wreak havoc on GNSS signals, causing multipath errors and outright signal loss.
For a normal GNSS/INS, this means a drifting, jumping trajectory with serious gaps occurring in the data. This could translate to warped buildings, misaligned road features, and a ruined point cloud that will either be rejected by the client or require a very costly re-survey.
Our gx/ix technology is your best defence against this. It’s an advanced proprietary algorithm that allows the GNSS/INS to use raw data from fewer satellites than would normally be required for a standard position fix.
When operating in ix mode, our system helps you by maintaining positioning accuracy when only one or two satellites are visible, using raw measurements to aid the inertial sensors and prevent drift.
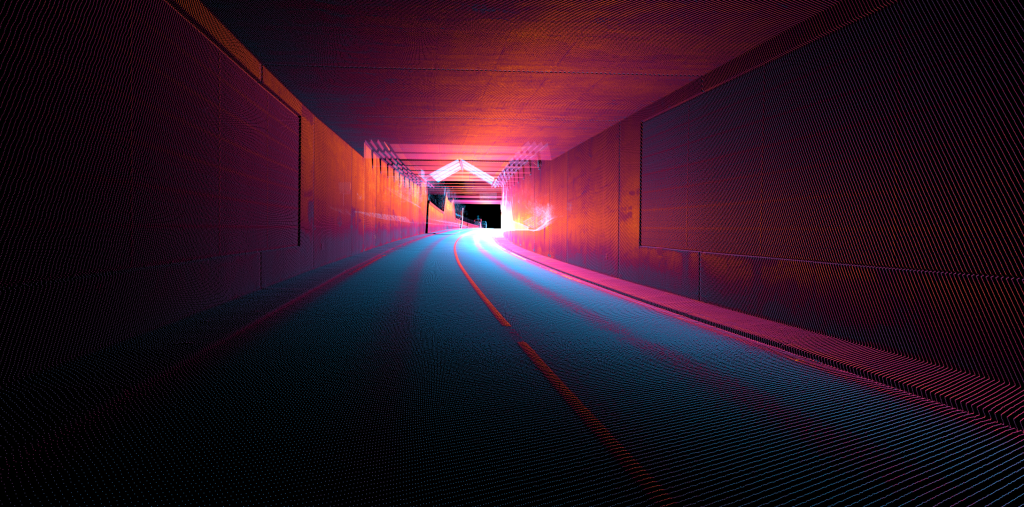
Intelligent adaptation means that when you exit challenging environments like tunnels, the system returns to centimetre-level accuracy much faster than conventional systems, minimising data gaps and ensuring continuous measurement quality.
With gx/ix, you’ll keep your trajectory smooth and accurate where other systems fail, allowing you to take on challenging, and complex urban projects with true confidence.
The ultimate safety net: raw data output
Large-scale survey jobs can last for hours and create massive amounts of data. You need a way to store it all and, crucially, the flexibility to squeeze every drop of accuracy out of it in post-processing.
Our raw data output feature code is the answer. You can log all of your data to an external drive, so you’re not limited by internal storage. But more importantly, you can log the raw GNSS and IMU measurements.
This means you can take that raw data back to the office and use our powerful NAVsolve software to re-process it. You can apply more precise satellite correction data if you have it, or run our forwards/backwards processing algorithm to improve accuracy.
This combined “smoothing” process allows our Kalman filter to make more intelligent decisions, looking at the entire dataset to resolve ambiguities and create a final trajectory that’s even more accurate than what you could get in real-time.
It’s the ultimate flexibility when you need the best georeferencing results.
A simpler, faster workflow: building better point clouds without the headache with OXTS Georeferencer
Combining GNSS/INS data and raw LiDAR data has – until now – been time-consuming and complex. It involved clunky, command-line-driven third-party software, custom scripts, and a lot of manual data processing. This process was not only slow and required specialist knowledge, but it was also a common source of errors that could compromise the final deliverable.
OXTS Georeferencer makes that process simpler and faster, without compromising the quality of the output. Activating the feature code on your device enables you to export your data to our purpose-built tool with a simple, intuitive drag-and-drop interface. Give it the files, and it does the heavy lifting, creating a perfectly georeferenced point cloud in standard formats like .LAS.
It works with a huge range of LiDAR sensors from leaders in the industry – Robosense, Ouster, Hesai, and more, streamlining your whole workflow.
This means less time spent on tedious data management, more time on value-added analysis, and dramatically reduced the training time for new team members, making your entire operation more flexible and scalable.
The solution to blurry point clouds: boresight calibration
Boresight misalignment is one of the hardest problems to solve in mobile mapping. It’s the tiny, almost invisible difference in angle between the coordinate system of your INS and your LiDAR.
A heading error of just 0.2 degrees can throw off a point by 7 cm at a distance of only 10 meters.
This shows up as a blurry “double vision” effect in your final point cloud. Flat surfaces like walls will look fuzzy and thick, and sharp corners will appear rounded and indistinct, making the data useless for precise measurements and damaging the quality of the point cloud.
The boresight calibration tool in OXTS Georeferencer is the ultimate solution.
Instead of trying to measure these angles by hand with a ruler and protractor (which is impossible to do accurately), you perform a quick, 2-3 minute calibration drive around our boresight targets or a flat, feature-rich wall, making sure to capture it from multiple angles. Our software then analyses how these static features appear in the data and automatically calculates the exact angular offsets with a precision you could never get manually. Doing this quick step at the start of your survey saves you hours of frustrating cleanup work later and guarantees a sharp, accurate point cloud – it’s all about getting it right from the start.
The whole process is a simple, three-step workflow right within the OXTS ecosystem:
- Process your trajectory: Run your raw INS data through NAVsolve. This is where you apply the best correction data and use forward/backward processing to create the most accurate possible path for your vehicle.
- Align your sensors: Use the simple, data-driven Boresight tool in OXTS Georeferencer to precisely calculate and eliminate the angular alignment errors between your sensors.
- Georeference: Use OXTS Georeferencer to combine your perfect trajectory and calibrated LiDAR data. This final step applies the timing, position, orientation, and boresight data to every single LiDAR point, creating a final, crisp, and accurate point cloud.
From data capture to competitive edge
An OXTS system is more than just a GNSS/INS. It’s a complete, integrated ecosystem engineered to address the modern surveyor’s dual georeferencing needs for accuracy and efficiency.
It represents a fundamental shift in the mobile mapping workflow: from a reactive process of cleaning up errors in post-processing to a proactive approach of getting the data right from the very start.
This “get it right” philosophy is your competitive advantage. Our software and hardware features guarantee data integrity in the most challenging field conditions, while the software tools dramatically accelerate the path to your final deliverable.
Talk to our applications engineers today to map the right feature codes and start getting cleaner, faster, more repeatable georeferencing results.
Contact us to learn more about how you can maximise the value of your existing OXTS hardware.
Download the RT3000 v4 Datasheet
Learn more about the specifications you can expect from our flagship inertial navigation system the RT3000 v4.


