 English
English
 Chinese
Chinese
 German
German
 Spanish
Spanish
 Korean
Korean

データ取得から競争力強化へ
複雑な環境をマッピングするとき、あなたは2つの面で戦っています。顧客は可能な限り正確で完璧なデータを要求し、顧客は可能な限り効率的に作業することを要求します。.
完璧なジオリファレンスを追求するあまり、効率性が損なわれ、納期遅れやコストオーバーにつながることもあります。しかし、時間を節約するために手を抜くことは、正確さと、あなたのプロとしての評判全体が築き上げた信頼性を破壊することになります。.
要するに、ジオリファレンス用の測位データを収集する方法が必要なのだ。
- A正確
- 信頼できる
- Wオークス 最初から
同時に、生データを高精度のジオリファレンス付き点群(LiDARを使用していない場合は他の種類の測量)に変換するために、バックオフィス作業を効率化する必要があります。.
実際のところ、地上管制点や基本的なGNSS/INSシステムでさえ、こうした二重の圧力についていけなくなっている。.
このブログでは、次の方法を紹介する。 OXTS GNSS/INS ジオリファレンス・デバイスは、お客様のような測量士を念頭に設計された特別な機能により、ジオリファレンス作業における相反するプレッシャーの管理を支援します。これらの機能は 機能コード OXTSをご利用のお客様で、ジオリファレンス・プロセスのレベルアップにご興味のある方は、ぜひご利用ください、, 今すぐご連絡ください.
信頼できるデータの取得
信頼できるフィールドワーク は 最終的な成果物全体が構築される土台となる。. 後処理は最適化において重要な役割を果たす。 あなたのデータ、エラー調査プロセスがデータに影響を与える可能性がある。 再調査はコストと時間のかかる失策である。.
当社のハードウェアとジオリファレンス機能は、現場で収集したデータが最初から揺るぎないものであることを確認し、プロジェクト全体の整合性の基盤を構築するように設計されています。.
PTP/GPTPで各センサーを同期
直接ジオリファレンスは理論的には簡単です:LiDARが見ている1つ1つのポイントについて、センサーがどこにあり、その正確な位置でどのような向きになっていたかを正確に知る必要があります。 時点. .これは、INSのクロックとLiDARのクロックが可能な限り完全に同期している場合にのみ可能です。.
そうでないと、点群が歪んでしまう。.
わずか数ミリ秒のタイミング・エラーが、このような事態を引き起こす可能性がある。 調査 そのため、最終的な点群が引き伸ばされ、ぼやけた使い勝手の悪いものになってしまうのだ。. 車で通り過ぎるときに建物をスキャンすることを想像してほしい。タイミングがずれると、建物の正面は引き伸ばされたり圧縮されたりして見え、直線はゆがんだりギザギザになったりする。.
私たちの PTP/gPTP 同期機能は、これを簡単にします。標準的なネットワーク・プロトコルを使用し、すべてのセンサーが同じ超高精度の時刻で動作していることを確認します。.
これは、あなたのセンサー・スイート全体を、1つの統一されたタイムラインで動作する、1つのまとまった機器に変えます。これは、“どこで”(GNSS/INSから)と “何を”(LiDARから)を結びつける重要なリンクであり、本格的なモバイルマッピングのセットアップには絶対に必要なものです。.

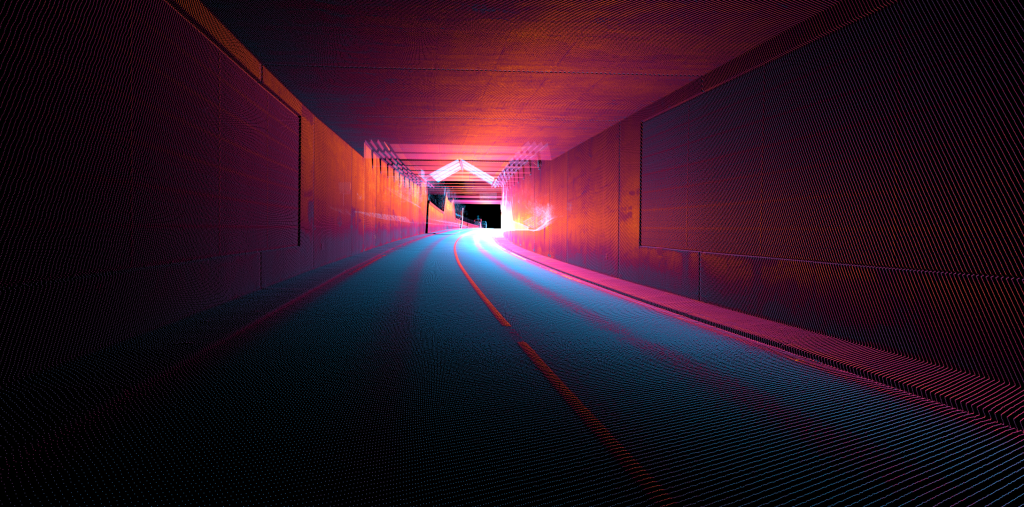
gx/ixで都会のジャングルでも正確さを保つ
多くの 最も 貴重なマッピング・プロジェクトは、高層ビルがGNSS信号に大混乱を与え、マルチパス・エラーや完全な信号損失を引き起こす、活気ある都市の中心にある。.
通常のGNSS/INSの場合、これはデータに深刻なギャップが発生し、ドリフトし、ジャンプする軌道を意味する。. その結果、建物がゆがんだり、道路の位置がずれたり、点群が台無しになったりする可能性があり、クライアントに拒否されるか、非常にコストのかかる再調査が必要になる。.
当社のgx/ixテクノロジーは、このような事態に対する最善の防御策です。これは、GNSS/INSが標準的な位置修正に通常必要とされるよりも少ない衛星からの生データを使用することを可能にする高度な独自のアルゴリズムです。.
ixモードでは、衛星が1つまたは2つしか見えない場合でも、測位精度を維持し、慣性センサーを補助してドリフトを防ぐために生の測定値を使用します。.
インテリジェントな適応は、トンネルのような厳しい環境から出たときに、システムが従来のシステムよりもはるかに速くセンチメートル・レベルの精度に戻ることを意味し、データ・ギャップを最小限に抑え、継続的な測定品質を保証します。.
gx/ixを使えば、他のシステムが失敗するような場面でも、スムーズで正確な軌道を維持することができ、困難で複雑な都市プロジェクトに真の自信を持って挑むことができます。.
究極のセーフティネット:生データの出力
大規模な測量作業は何時間にも及び、膨大な量のデータが作成されます。そのすべてを保存する方法と、重要なのは、後処理で精度を一滴残らず引き出す柔軟性が必要です。.
私たちの生データ出力機能コードがその答えです。外部ドライブにすべてのデータをログできるので、内部ストレージに制限されません。しかし、より重要なのは、生のGNSSとIMU測定値を記録できることです。.
つまり、生データをオフィスに持ち帰り、強力なNAVsolveソフトウェアを使って再処理できるのです。より正確な衛星補正データをお持ちの場合はそれを適用したり、前方/後方処理アルゴリズムを実行して精度を向上させることができます。.
この「スムージング」プロセスを組み合わせることで、カルマンフィルターはよりインテリジェントな判断を下し、データセット全体を見て曖昧さを解消し、リアルタイムで得られるものよりもさらに正確な最終的な軌道を作成することができる。.
最高のジオリファレンス結果が必要なときに、究極の柔軟性を発揮します。.
よりシンプルで迅速なワークフロー:OXTS Georeferencer を使えば、頭を悩ませることなく、より優れた点群データを作成できます。
GNSS/INSデータと未加工のLiDARデータの組み合わせは、これまで時間がかかり複雑でした。不便なコマンドライン駆動のサードパーティ製ソフトウェア、カスタムスクリプト、そして多くの手作業によるデータ処理が必要でした。このプロセスは時間がかかり、専門的な知識が必要であるだけでなく、最終的な成果物を損なうエラーの原因ともなっていました。.
OXTS Georeferencer は、出力の品質を損なうことなく、そのプロセスをよりシンプルかつ迅速にします。デバイスのフィーチャーコードをアクティブにすると、シンプルで直感的なドラッグ&ドロップのインターフェースで、専用ツールにデータをエクスポートできます。ファイルを与えると、.LAS のような標準フォーマットで完璧にジオリファレンスされた点群データを作成します。.
業界をリードする様々なLiDARセンサーに対応しています。 ロボセンス, Ouster、Hesaiなど、ワークフロー全体を効率化します。.
つまり、面倒なデータ管理に費やす時間を減らし、付加価値の高い分析により多くの時間を割けるようになり、新しいチームメンバーのトレーニング時間も劇的に短縮されるため、業務全体がより柔軟でスケーラブルになります。.
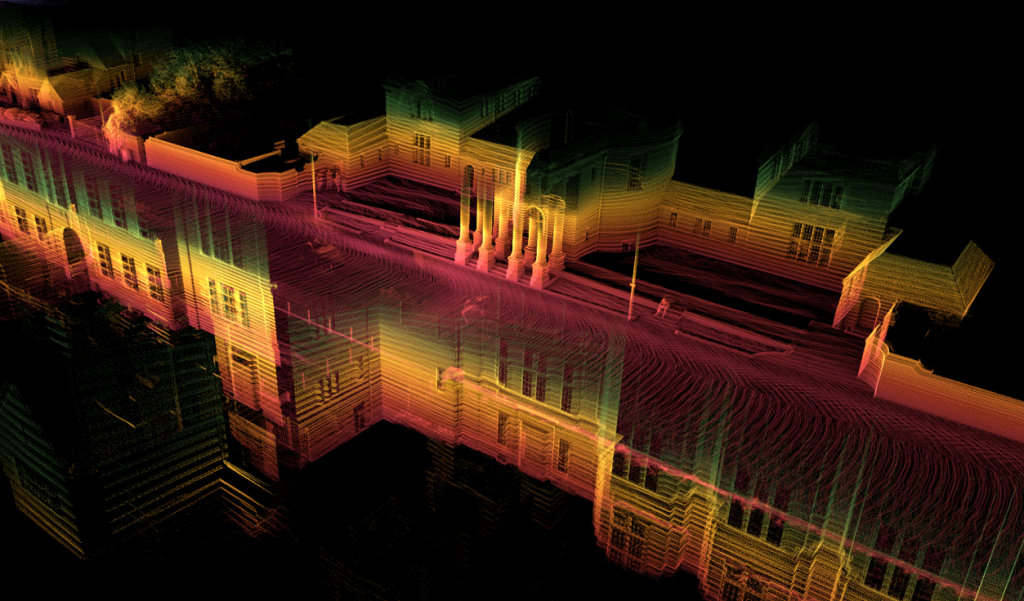
不鮮明な点群に対する解決策:ボアサイト校正
ボアサイトミスアライメントは、モバイルマッピングにおいて最も解決困難な問題の一つです。これは、INSの座標系とLiDARの間の、ほとんど目に見えない小さな角度の違いです。.
わずか0.2度の方位角の誤差は、わずか10メートルの距離で7センチもの誤差を生む。.
これは、最終的な点群にぼやけた「二重像」効果として現れます。壁のような平らな面はぼんやりと太く見え、鋭い角は丸みを帯びて不明瞭に見えるため、正確な測定には役立たず、点群の品質も損なわれます。.
OXTS Georeferencerのボアサイト校正ツールは究極のソリューションです。.
定規や分度器を使って手作業でこれらの角度を測定する代わりに(正確な測定は不可能です)、ボアサイトターゲットや平らで特徴のある壁の周りを2~3分かけて素早くキャリブレーションし、複数の角度から撮影します。その後、当社のソフトウェアが、これらの静的な特徴がどのようにデータに現れるかを分析し、手動では決して得られない精度で正確な角度オフセットを自動的に計算します。測量開始時にこのステップを実行することで、後々のクリーンアップ作業に何時間も費やす必要がなくなり、シャープで正確な点群データを得ることができます。.
全プロセスは、OXTSエコシステム内でのシンプルな3ステップのワークフローです:
- 軌跡を描く: INSの生データをNAVsolveに通します。ここで最適な補正データを適用し、フォワード/バックワードプロセッシングを使用して、自車にとって最も正確な経路を作成します。.
- センサーの位置を合わせる: OXTS Georeferencerのシンプルなデータ駆動型ボアサイト・ツールを使用して、センサー間の角度アライメント誤差を正確に計算し、除去します。.
- ジオリファレンス: OXTS Georeferencer を使用して、完璧な軌跡と校正された LiDAR データを組み合わせます。この最終ステップでは、タイミング、位置、方向、およびボアサイトデータをすべてのLiDARポイントに適用し、最終的に鮮明で正確な点群を作成します。.
データ取得から競争力強化まで
OXTSシステムは単なるGNSS/INSではありません。OXTSシステムは、正確で効率的な測量を必要とする現代の測量業者のニーズに対応するために設計された、完全で統合されたエコシステムです。.
これは、モバイル・マッピングのワークフローにおける根本的な転換を意味する。つまり、後処理でエラーを一掃するという消極的なプロセスから、最初からデータを正しく取得するという積極的なアプローチへの転換である。.
この “get it right ”の哲学が、お客様の競争優位性です。当社のソフトウェアとハードウェアの機能は、最も厳しい現場条件下でもデータの完全性を保証し、ソフトウェアツールは最終成果物までの道のりを劇的に加速します。.
適切なフィーチャコードをマッピングし、よりクリーンで高速、再現性の高いジオリファレンス結果を得るために、今すぐ弊社のアプリケーションエンジニアにご相談ください。.
お問い合わせ をクリックして、既存のOXTSハードウェアの価値を最大化する方法について詳細をご覧ください。.
RT3000 v4のデータシートをダウンロードする
慣性航法システムのフラッグシップモデル「RT3000 v4」のスペックについて、詳しくはこちらをご覧ください。.


