 English
English
 Chinese
Chinese
 German
German
 Japanese
Japanese
 Korean
Korean

De la captura de datos a la ventaja competitiva
Cuando se cartografían entornos complejos, se libra una batalla en dos frentes. Tus clientes exigen datos perfectos, lo más precisos posible, y tu cuenta de resultados exige que trabajes con la mayor eficacia posible.
La búsqueda de la perfección en la georreferenciación puede acabar con la eficacia y provocar el incumplimiento de plazos y sobrecostes. Pero tomar atajos para ahorrar tiempo destruiría la precisión y la credibilidad sobre las que se asienta toda su reputación profesional.
En resumen, se necesita una forma de recopilar datos de posicionamiento para la georreferenciación que sea
- Accurate
- Fiable
- Works acertar a la primera
Al mismo tiempo, hay que agilizar el trabajo de back office para convertir esos datos brutos en una nube de puntos georreferenciada de gran precisión (u otro tipo de levantamiento si no se utiliza LiDAR).
La verdad es que los puntos de control terrestre e incluso los sistemas básicos GNSS/INS ya no pueden seguir el ritmo de estas presiones duales.
En este blog, mostramos cómo OXTS GNSS/INS le ayudan a gestionar las presiones conflictivas del trabajo de georreferenciación, mediante funciones especializadas diseñadas pensando en topógrafos como usted. Se accede a ellas activando códigos de características en tu dispositivo - así que si eres un cliente de OXTS interesado en nivelar tu proceso de georreferenciación, póngase en contacto con nosotros.
Datos fiables
Trabajo de campo fiable es la base sobre la que se construye todo su producto final. Aunque el postprocesado desempeña un papel vital en la optimización sus datos, los errores durante la sEl proceso de encuesta puede afectar a los datos hasta el punto de que no queda más remedio que una nueva encuesta, un paso en falso costoso y que lleva mucho tiempo.
Nuestras funciones de hardware y georreferenciación están diseñadas para garantizar que los datos que recopile sobre el terreno sean sólidos desde el principio, creando una base de integridad para todo el proyecto.
Sincroniza cada sensor con PTP/GPTP
En teoría, la georreferenciación directa es sencilla: para cada punto que ve el LiDAR, es necesario saber exactamente dónde estaba el sensor y cómo estaba orientado en ese momento exacto. momento en el tiempo. Esto sólo es posible si el reloj del INS y el del LiDAR están lo más sincronizados posible.
Si no lo están, tu nube de puntos acabará distorsionada.
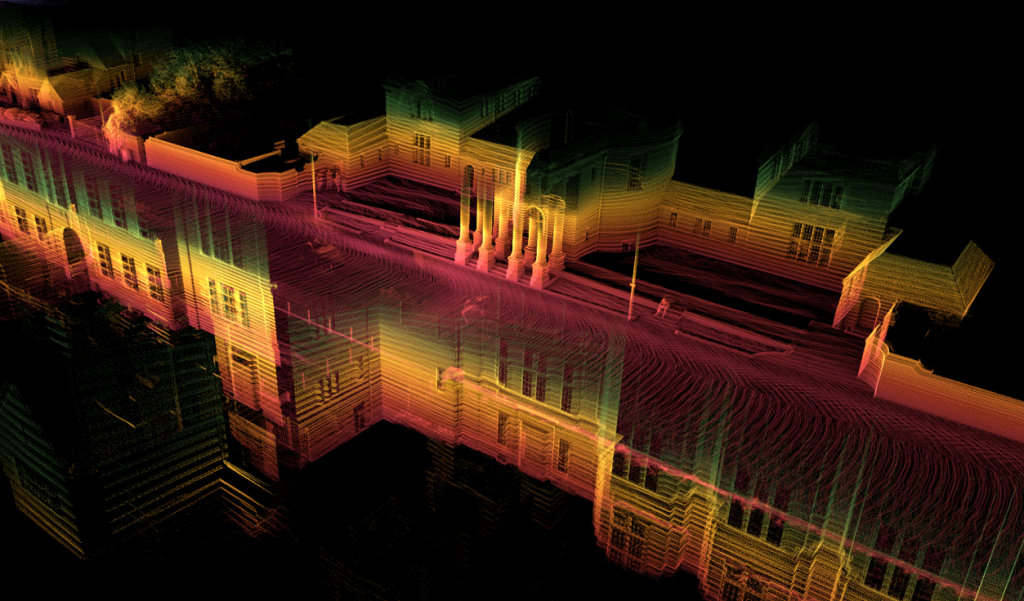
Un error de sincronización de sólo unos milisegundos puede causar un encuesta que el dispositivo esté a metros de su posición real, estirando y cortando la nube de puntos final hasta convertirla en un lío borroso e inutilizable. Imagina que observas un edificio al pasar. Si la sincronización es incorrecta, la fachada del edificio aparecerá estirada o comprimida, y las líneas rectas se volverán alabeadas e irregulares.
Nuestra PTP/gPTP facilita esta tarea. Utiliza un protocolo de red estándar para garantizar que todos los sensores funcionan con la misma hora, con una precisión superior a los microsegundos.
Convierte todo el conjunto de sensores en un único instrumento cohesionado que opera en una línea de tiempo unificada. Es el vínculo fundamental que une el “dónde” (del GNSS/INS) con el “qué” (del LiDAR), y es imprescindible para cualquier configuración de cartografía móvil seria.

Precisión en la jungla urbana con gx/ix
Muchos más valiosos proyectos de cartografía se encuentran en el corazón de ciudades bulliciosas, donde los edificios altos causan estragos en las señales GNSS, provocando errores por trayectos múltiples y la pérdida total de la señal.
Para un GNSS/INS normal, esto significa una trayectoria a la deriva, con saltos y graves lagunas en los datos. Esto podría traducirse en edificios deformados, carreteras desalineadas y una nube de puntos arruinada que el cliente rechazaría o que requeriría un nuevo levantamiento muy costoso.
Nuestra tecnología gx/ix es su mejor defensa. Se trata de un algoritmo patentado avanzado que permite al GNSS/INS utilizar datos sin procesar de menos satélites de los que se necesitarían normalmente para fijar una posición estándar.
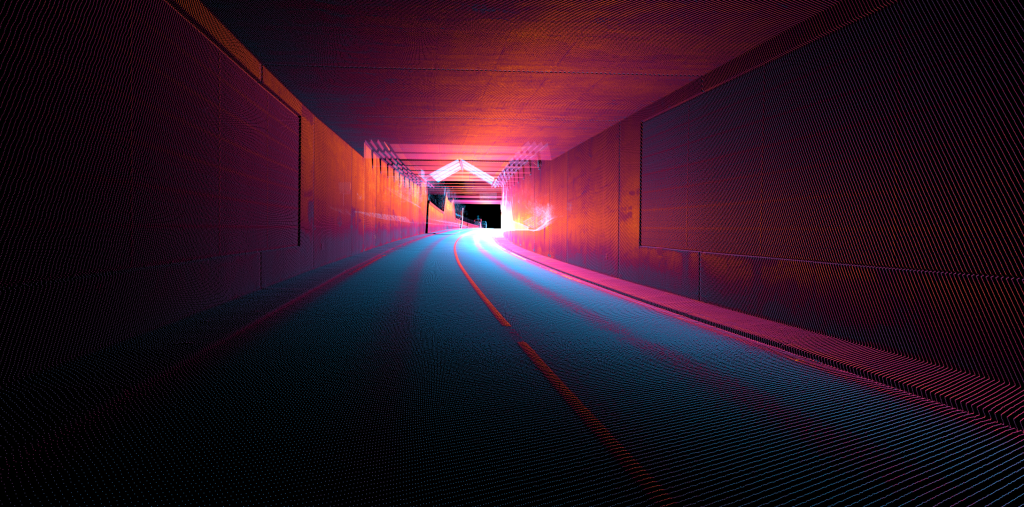
Cuando funciona en modo ix, nuestro sistema le ayuda a mantener la precisión de posicionamiento cuando sólo son visibles uno o dos satélites, utilizando mediciones brutas para ayudar a los sensores inerciales y evitar la deriva.
La adaptación inteligente significa que, al salir de entornos difíciles como túneles, el sistema recupera la precisión centimétrica mucho más rápido que los sistemas convencionales, minimizando las lagunas de datos y garantizando una calidad de medición continua.
Con gx/ix, mantendrá una trayectoria suave y precisa donde otros sistemas fallan, lo que le permitirá afrontar proyectos urbanos complejos y desafiantes con verdadera confianza.
La última red de seguridad: la salida de datos brutos
Los trabajos topográficos a gran escala pueden durar horas y generar cantidades ingentes de datos. Necesitas una forma de almacenarlos y, sobre todo, flexibilidad para exprimir hasta la última gota de precisión en el postprocesamiento.
Nuestro código de función de salida de datos en bruto es la respuesta. Puede registrar todos sus datos en una unidad externa, por lo que no está limitado por el almacenamiento interno. Pero lo más importante es que puedes registrar las mediciones GNSS e IMU sin procesar.
Esto significa que puede llevarse esos datos sin procesar a la oficina y utilizar nuestro potente software NAVsolve para volver a procesarlos. Puede aplicar datos de corrección por satélite más precisos si los tiene, o ejecutar nuestro algoritmo de procesamiento hacia delante/atrás para mejorar la precisión.
Este proceso combinado de “suavizado” permite a nuestro filtro Kalman tomar decisiones más inteligentes, teniendo en cuenta todo el conjunto de datos para resolver ambigüedades y crear una trayectoria final aún más precisa que la que se podría obtener en tiempo real.
Es la máxima flexibilidad cuando se necesitan los mejores resultados de georreferenciación.
Un flujo de trabajo más sencillo y rápido: crear mejores nubes de puntos sin quebraderos de cabeza con OXTS Georeferencer
Hasta ahora, la combinación de datos GNSS/INS y datos LiDAR sin procesar requería mucho tiempo y era compleja. Implicaba un software de terceros complejo y basado en líneas de comandos, secuencias de comandos personalizadas y mucho procesamiento manual de los datos. Este proceso no sólo era lento y requería conocimientos especializados, sino que también era una fuente habitual de errores que podían comprometer el resultado final.
OXTS Georeferencer simplifica y acelera ese proceso, sin comprometer la calidad del resultado. Al activar el código de función en su dispositivo, podrá exportar sus datos a nuestra herramienta específica con una interfaz sencilla e intuitiva de arrastrar y soltar. Dale los archivos y hará el trabajo pesado, creando una nube de puntos perfectamente georreferenciada en formatos estándar como .LAS.
Funciona con una amplia gama de sensores LiDAR de los líderes del sector. Robosense, Ouster, Hesai, etc., agilizando todo su flujo de trabajo.
Esto significa menos tiempo dedicado a la tediosa gestión de datos, más tiempo para análisis de valor añadido y una reducción drástica del tiempo de formación de los nuevos miembros del equipo, lo que hace que toda su operación sea más flexible y escalable.
La solución a las nubes de puntos borrosas: calibración de la puntería
La desalineación de la mira es uno de los problemas más difíciles de resolver en la cartografía móvil. Se trata de la diminuta y casi invisible diferencia de ángulo entre el sistema de coordenadas de tu INS y tu LiDAR.
Un error de rumbo de sólo 0,2 grados puede desviar un punto 7 cm a una distancia de sólo 10 metros.
Esto se traduce en un efecto de “doble visión” borrosa en la nube de puntos final. Las superficies planas, como las paredes, se verán borrosas y gruesas, y las esquinas afiladas aparecerán redondeadas e indistintas, lo que inutilizará los datos para mediciones precisas y dañará la calidad de la nube de puntos.
La herramienta de calibración de puntería de OXTS Georeferencer es la solución definitiva.
En lugar de intentar medir estos ángulos a mano con una regla y un transportador (lo cual es imposible de hacer con precisión), usted realiza un rápido recorrido de calibración de 2-3 minutos alrededor de nuestros objetivos de puntería o de una pared plana y rica en características, asegurándose de capturarla desde múltiples ángulos. A continuación, nuestro software analiza cómo aparecen estas características estáticas en los datos y calcula automáticamente los desplazamientos angulares exactos con una precisión que nunca podría obtener manualmente. Este rápido paso al inicio del levantamiento le ahorrará horas de frustrante trabajo de limpieza posterior y le garantizará una nube de puntos nítida y precisa.
Todo el proceso es un sencillo flujo de trabajo en tres pasos dentro del ecosistema OXTS:
- Procesa tu trayectoria: Ejecute sus datos INS sin procesar a través de NAVsolve. Aquí es donde se aplican los mejores datos de corrección y se utiliza el procesamiento hacia adelante/hacia atrás para crear la trayectoria más precisa posible para el vehículo.
- Alinea tus sensores: Utilice la sencilla herramienta Boresight, basada en datos, de OXTS Georeferencer para calcular con precisión y eliminar los errores de alineación angular entre sus sensores.
- Georeferencia: Utilice OXTS Georeferencer para combinar su trayectoria perfecta y los datos LiDAR calibrados. Este paso final aplica los datos de sincronización, posición, orientación y puntería a cada punto LiDAR, creando una nube de puntos final nítida y precisa.
De la captura de datos a la ventaja competitiva
Un sistema OXTS es más que un simple GNSS/INS. Es un ecosistema completo e integrado diseñado para satisfacer las necesidades de georreferenciación del topógrafo moderno en cuanto a precisión y eficiencia.
Representa un cambio fundamental en el flujo de trabajo de la cartografía móvil: de un proceso reactivo de limpieza de errores en el postprocesamiento a un enfoque proactivo para obtener los datos correctos desde el principio.
Esta filosofía de “hacerlo bien” es su ventaja competitiva. Nuestras funciones de software y hardware garantizan la integridad de los datos en las condiciones de campo más exigentes, mientras que las herramientas de software aceleran drásticamente el proceso hasta el producto final.
Hable hoy mismo con nuestros ingenieros de aplicaciones para asignar los códigos de características adecuados y empezar a obtener resultados de georreferenciación más limpios, rápidos y repetibles.
Póngase en contacto con nosotros para obtener más información sobre cómo puede maximizar el valor de su hardware OXTS existente.
Descargar la ficha técnica de RT3000 v4
Obtenga más información sobre las especificaciones que puede esperar de nuestro sistema de navegación inercial estrella, el RT3000 v4.

