 English
English
 German
German
 Spanish
Spanish
 Japanese
Japanese
 Korean
Korean

本文介绍了 OXTS RT 系列 GNSS/INS 用户如何遵循正确的配置、初始化和预热步骤,以充分发挥 RT 系列产品的精度。.
无论您是在试验场(如开放式测试跑道或具备良好 GNSS 条件的封闭道路)进行车辆动力学或 ADAS 测试,还是在进行测量和绘图项目(如道路移动测绘或 LiDAR 测量),遵循此处所述的 RT 系列最佳实践工作流程将有助于确保您获得最可靠的数据,并增强您使用我们设备的信心。.
本文的所有解释都将基于OXTS的旗舰产品 RT3000 v4. 其他模型的用户也可以参考本指南,我们将在有差异的步骤中加以注明。.
1) 硬件安装
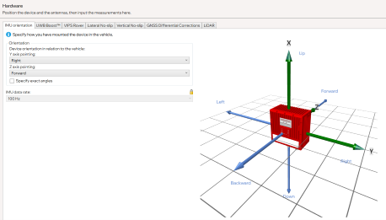
a. IMU方向
RT单元(红色框)通常应水平安装并对齐,与车辆坐标系统的倾斜角度应保持在5°以内。在这种情况下,您只需在 IMU 方向 接口,因为后续的预热过程可以充分纠正这个错误。.
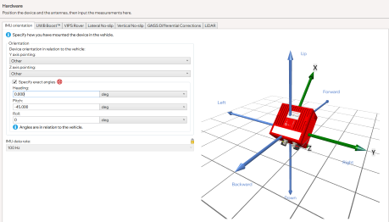
如果无法将其平放,请使用智能手机水平仪工具测量近似角度,然后标记 指定精确角度, 输入数值,并检查右侧的图像是否与实际方向匹配。误差也应保持在 5° 以内。.
b. IMU 安装稳定性
RT单元与车辆之间不存在相对移动至关重要。要检查这一点,请尝试沿三个平移轴和三个旋转轴摇动该单元——在所有六个方向上,该设备都应感觉牢固,没有松动。.
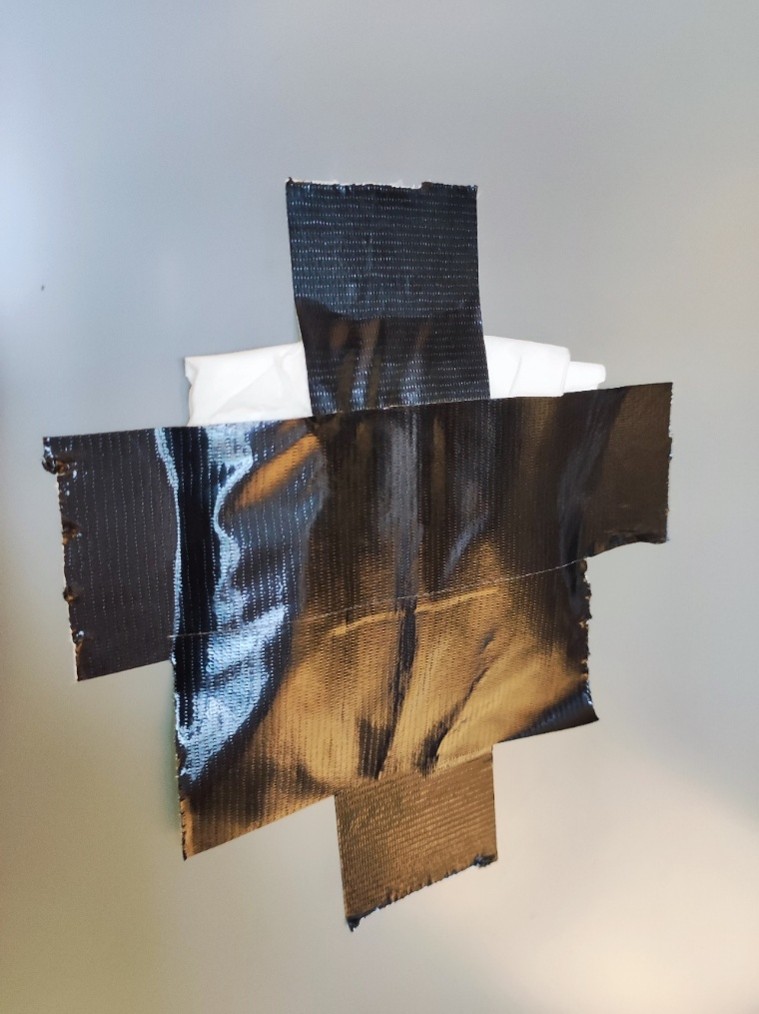
对于没有天窗的车辆,RT支架通常能很好地固定设备。对于有天窗的车辆,请提前在玻璃表面贴上合适的布基胶带(必要时在下方垫上纸巾),为RT支架的顶部接触点提供稳定的支撑。.
c. 双天线配置正确
双天线对于低速航向稳定性至关重要,我们建议始终使用双天线。请确保天线未连接到错误的端口。一个实用的技巧是,用相同颜色的胶带标记每根天线电缆的两端。.

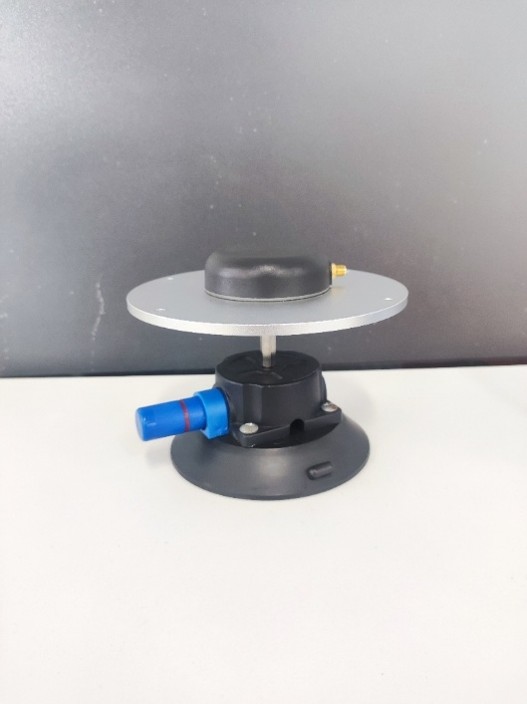
d. 合适的接地平面解决方案
对于带玻璃车顶的车辆,请使用合适的车载天线地平面以防止车舱内 GNSS 多径效应,如下图所示:
e. 天线布置与间距
天线应安装在车辆的最高点,且其间应尽量减少障碍物(例如,不要有激光雷达单元)。间距越大越好——理想情况下应至少相距1.5米。.
f. 稳定的电源供应
请提供稳定的 12 V 或 24 V 电源。如果使用汽车点烟器接口,请确保已禁用启停功能(燃油车)或驾驶员离开时断电功能(电动车)。如果不确定,可以查看设备的 FTP 日志中的 RD 条目。 短时间内出现多个 RD 条目,表明设备已反复断电和通电,这可能意味着电源不稳定。.
2) 关键软件设置
a. 测量重点和方法
确保以下测量的准确性:
- 双天线间距精度:在 0.5 厘米
- 横向滑移和纵向滑移:在 10 厘米
- 其他距离参数:以内 10 厘米
实用技巧
- 双天线间距:使用卷尺直接从天线连接器处测量。.
- RT对地面:从RT参考点测量到车辆地板,然后加上地板到地面的高度。.
- 天线到惯性测量单元:直接测量到车顶的高度;对于纵向和横向距离,使用车辆投影参考点。.
b. 横向和纵向打滑配置
必须完成这些设置。它们有助于 RT 计算出车辆的真实姿态,这对于车辆动力学测试以及在 ADAS 测试中使用该设备作为追踪器至关重要。.
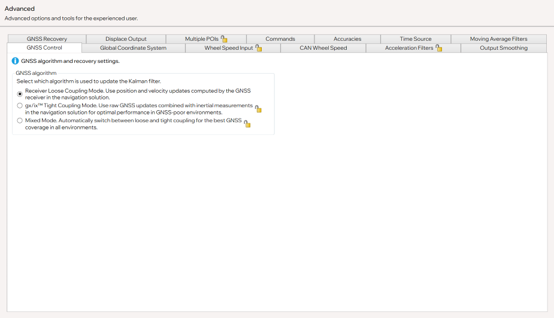
C. GNSS 控制
对于测试赛道的用户,请在当前版本中选择接收器模式。.
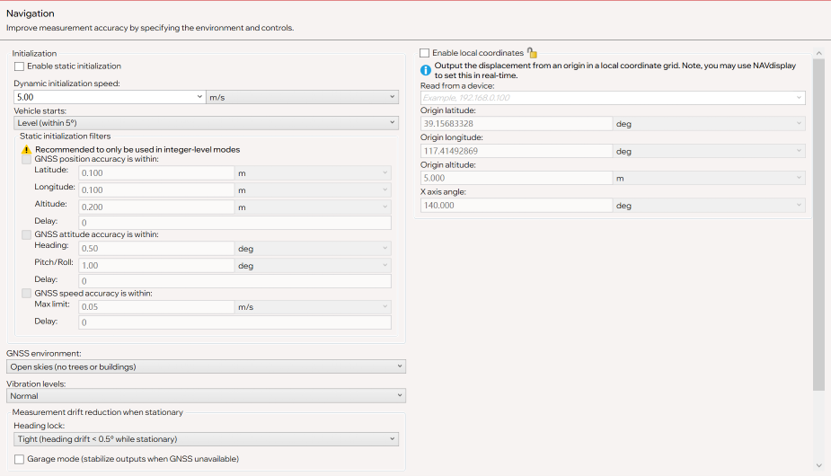
d. 初始化速度
我们建议将其设置为 5 米/秒。注意:如果您不希望设备立即初始化,请将车速保持在此阈值以下。.
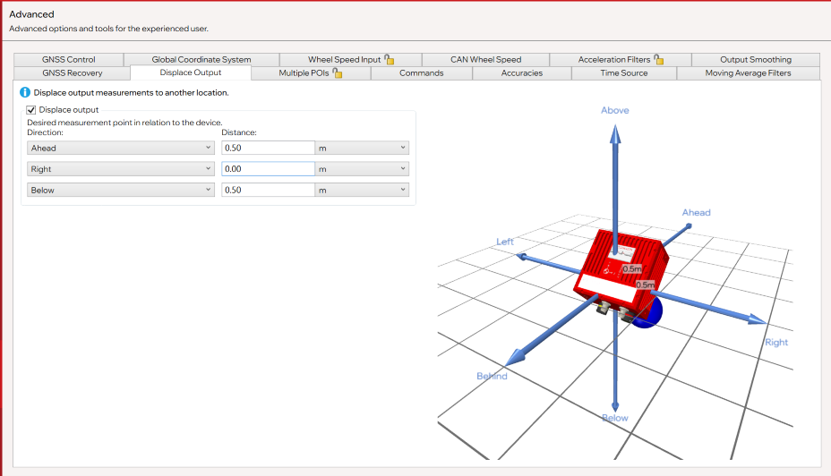
e. 位移输出
位移输出允许用户计算目标位置,但会增加加速度噪声(滤波可以减弱但无法完全消除)。我们建议将三维距离输出保持在1.2米以下。.
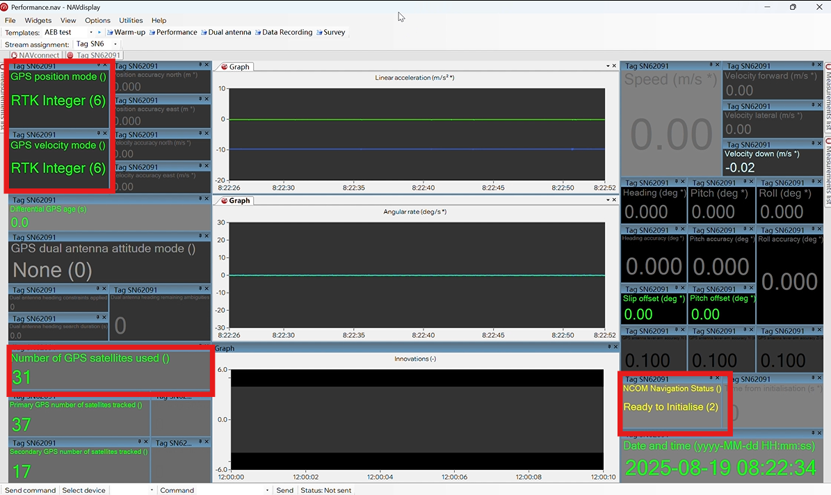
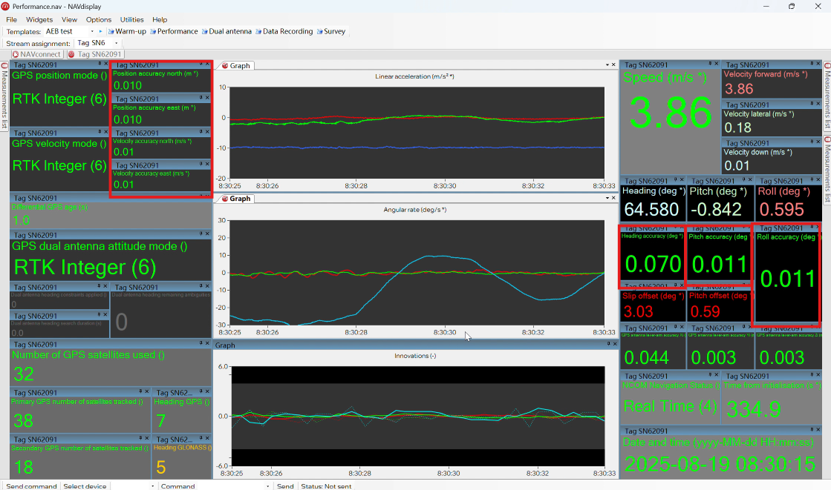
f. 设置后预期的 NavDisplay 指示符
- 卫星数量:通常为 28-34 颗。在接收器模式下,RT3000 v4 将跟踪 所有可见的卫星 但仅使用最有效的。如果显示“0”,请检查 双天线模板 → 点击左下角的“开启/确定”以确认天线连接。.
- 成功应用差分校正后,左上角应显示 RTK 整数。.
- 设备状态(右侧)应显示“准备初始化”。.
3) 初始化与热身
a. 初始化
加速至直线行驶,直到超过设定的启动速度(通常大于22公里/小时)。.
b. 热身和配置验证
预热期间,设备执行三项主要任务:
- 校准 IMU 比例因子和偏差(内部参数)
- 将RT坐标系与车辆坐标系对齐
- 计算IMU相对于天线的精确位置
c. 所需车辆动力学
- 驾驶并表演八字
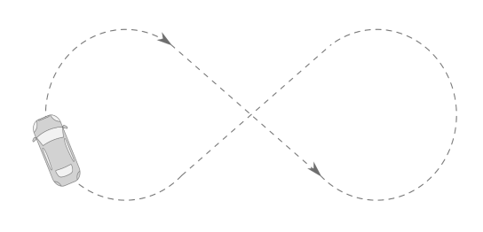
- 半径递减的匀速圆周运动
- 直线加速和制动 > 30公里/小时
- 回转机动
借助RT3000 v4中新的IMU10技术,只需5分钟正常的驾驶动态即可(无需激进的操控)。优化在初始化后立即开始,因此在完成直线加速后,请直接进行驾驶操控。.
对于旧型号(RT3000 v3、RT3003、RT3002),预热需要15分钟并更激进的驾驶。.
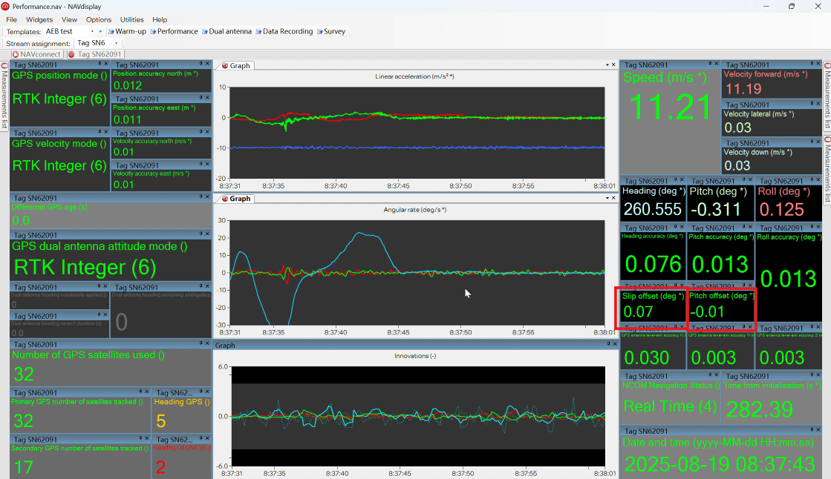
d. 如何验证配置
检查 表现 → 创新 曲线

- 如果在开始时出现剧烈波动,则某些配置可能不正确(例如,方向配置错误、测量误差或天线接反)。.
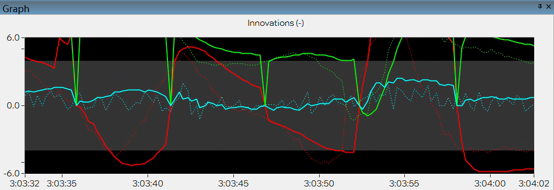
- 如果在特定动态下出现波动,但仍在灰色区域内,则重复这些操作以减少歧义。.
- 如果曲线在所有动力学下都收敛于零,则预热成功。另外,请检查红色框中的参数。 性能 确认屏幕.
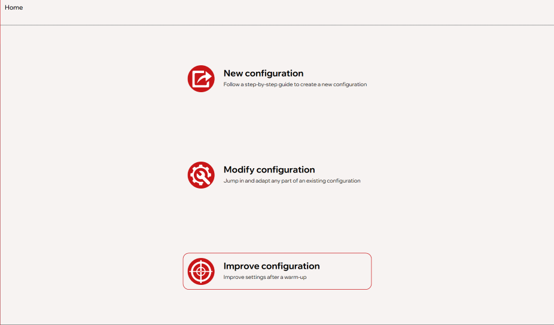
4) 优化配置
优化的目标是将改进后的参数写入设备配置文件。这个过程就像点击一样简单 下一页.
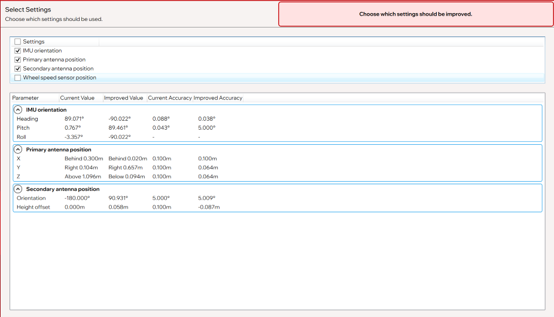
⚠️ 汽车测试:如果未连接车轮速度传感器,请勿勾选车轮速度选项。优化完成后,设备将重启。.
关于方向调整的说明
您可能会发现优化会显著改变航向、俯仰和/或偏航。这是正常的,因为多个航向/俯仰/偏航组合可以对应相同的物理方向。有关更多详细信息,请搜索术语“万向锁”。”
5) 热身后的测试
设备启动后,重复初始化和预热。正常迹象包括:
- 创新曲线保持稳定
- 大约 5 分钟动态后:
- 滑动偏移量 < 0.10
- 音高偏移 < 0.05
- 准确性指标均在预期值范围内
在此点,设备将以其最高精度测量所有数据。.
两个常见问题
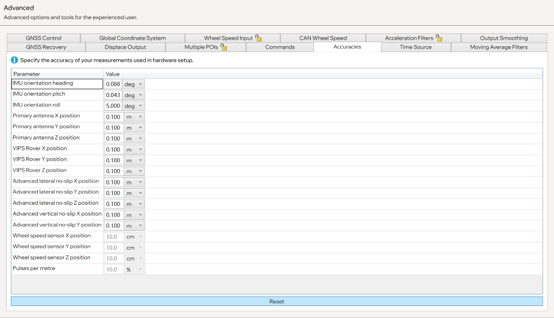
- 如果设备被大幅移动怎么办?
→ 我们建议从头开始配置。. - 如果设备只是轻微移动呢?
→ 去 高级 → 准确性, 重置准确度,并重复本指南中的步骤。.
6) RT系列最佳实践 – 最终说明
本指南涵盖 RT 系列设备的完整准备工作流程,包括配置、初始化和预热。这些步骤有时会被忽视,但它们往往决定了最终数据的准确性。.
对于汽车测试用户而言,这些操作确保了精准的车辆动力学和 ADAS 测试结果。对于测量和测绘用户而言,它们保证了高质量的 GNSS/INS 轨迹和可靠的点云数据。.
在本文中,我们努力阐明您在每一步中应该看到的内容,以便您可以轻松确认过程是否正确——例如:
- “这一步看起来是对的
- “这表明前面某个步骤可能存在错误”
一旦熟悉了这些步骤,它们将花费很少的时间,但会带来巨大的好处:无论是在测试还是在测绘中,您都将获得可靠、可控且最高精度的结果。.
我们强烈建议所有 RT 用户花时间遵循并实践这些关键步骤。如果您有任何疑问或遇到本指南未涵盖的情况,请随时 联系我们.
李杰瑞
高级客户支持工程师,OXTS
")

