 English
English
 German
German
 Spanish
Spanish
 Japanese
Japanese
 Korean
Korean

使用GNSS/INS进行精确的无人机地面真值验证至关重要。‘地面真值’一词指的是使用足够高精度的参考系统来测试或验证性能的手段。.
由于 无人驾驶飞行器 随着应用的多样化,无人机研发势头强劲,将精确无人机地面实况调查的概念引入了无人机行业。虽然 汽车行业 已经建立了一套非常成熟的实地验证方法,但它不能简单地应用于无人机。.
本文将详细阐述无人机测试中的地面实况核查,并概述OXTS如何在此领域提供支持。.
汽车和无人机实地验证的关键区别
与无人机相比,由于车辆运动和系统约束方面的优势,地面真实性在汽车测试中更容易实现:
- 车辆主要在二维平面上运行
- 姿态变化有限(滚转角和俯仰角小)
- 空间、电源和有效载荷容量很少受限
这使得将大型、高功率、高精度的地面真实性验证系统集成到车辆上相对容易。.
相比之下,无人机在截然不同的条件下运行:
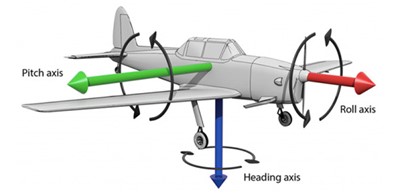
- 连续三维六自由度运动,具有恒定的横滚、俯仰和偏航变化
- 姿态变化频繁,姿态误差直接影响定位精度
- 严格的尺寸、重量和功率 (SWaP) 限制
这些因素使得准确的无人机地面验证在精度和系统集成方面都变得更加严峻。.
在无人机测试中“地面实况检验”的真正含义
如果你是汽车测试行业的工程师,尤其是 ADAS(高级驾驶辅助系统)工程师,你很可能熟悉“地面实况”这个词。在工程环境中,, 地面实况调查 并不意味着绝对真理。相反,它指的是一个其错误相对而言的参照物 比被测系统小得多,, 使其成为性能评估的可靠基准。.
对于无人机应用,可靠的地面真实性解决方案通常需要提供:
- 连续的三维位置轨迹
- 时间同步姿态数据(横滚、俯仰、偏航)
- 覆盖整个航班的高频数据
- 支持后处理和可重复分析
总而言之,这些元素共同构成了一个可靠的参考轨迹,用于性能评估和误差分析。.
为什么飞控系统的IMU不能用于地面真值校验
现代无人机飞行控制器已经结合了惯性测量单元(IMU)和全球导航卫星系统(GNSS)的数据来估算位置、速度和姿态。所以 为什么需要额外的惯性导航系统 (INS) 进行地面真实性检验?
答案在于惯性测量单元(IMU)和全球导航卫星系统(GNSS)在飞行控制系统中的设计优先级。这些传感器经过优化,旨在:
- 保持飞行稳定
- 满足实时控制要求
- 在可接受的操作限制內提供導航準確性
它们不被设计成高精度参考系统。在实践中:
- 由于积分漂移,IMU 误差会随时间累积
- GNSS的更新速率相对较低
- 这两种传感器融合都针对控制的鲁棒性进行了调整,而非最大精度
惯性导航系统(INS)通过先进的滤波算法将惯性测量单元(IMU)和全球导航卫星系统(GNSS)紧密耦合,克服了这些限制。即使在动态条件剧烈的情况下,也能实现稳定、不间断且精确的定位和姿态输出。.

将GNSS/INS用于精确无人机地面实况的两个核心挑战
准确性要求
地面实况检验的一个基本原则是参考系统必须比被测试系统精确得多。许多专业的无人机平台可以达到分米到米的定位精度。例如,载有成像载荷或激光雷达载荷的八旋翼无人机通常在悬停定位规格上约为 +/- 0.5 米到 1.5 米。.
为了有意义地验证此类系统,需要进行厘米级参考轨迹和同样精确的姿态信息。.
SWaP 限制
与汽车不同,无人机平台对任何附加设备都有严格的限制。地面真实性系统必须:
- 轻巧 质量直接影响耐力和稳定性
- 紧凑 大小限制有效载荷集成
- 低电量 功耗直接影响飞行时间
OXTS解决方案
OXTS xRED:对 SWaP 至关重要的 GNSS/INS 设备
当功率、重量或空间都非常有限时——但性能却不能打折扣。这款超紧凑型设备的设计宗旨是在每克、每瓦和每立方毫米的空间内最大限度地提高位置、方向和运动数据的精度。.
主要特点包括:
- 厘米级定位精度: RTK模式下精度可达1厘米,满足无人机地面真值采集要求
- 高精度姿态输出在GNSS可用条件下,俯仰和滚转精度为0.02°
- SWaP 设计56 x 53 x 10 毫米的紧凑尺寸,仅 39 克的重量,以及 4W 的功耗,非常适合集成到无人机中
- 后处理支持包含端到端软件工具链,可优化和生成高度一致的参考轨迹


