 English
English
 Chinese
Chinese
 German
German
 Spanish
Spanish
 Korean
Korean

GNSS/INS を使用した正確な UAV グラウンドトゥルージングは極めて重要です。グラウンドトゥルージングとは、十分な精度を持つ基準システムを使用して、パフォーマンスをテストまたは検証することを指します。.
として UAV アプリケーションの多様化に伴い、UAVの研究開発は大きな勢いを増しており、正確なUAV地上検証という概念がドローン産業にもたらされています。しかし、 自動車産業 グラウンドトゥルージングのための非常に成熟した方法論を確立していますが、ドローンにそのまま適用することはできません。.
この記事では、UAVテストにおけるグラウンドトゥルージングの詳細な説明と、OXTSがこの分野でどのようにサポートできるかを概説します。.
自動車とUAVのグラウンドトゥルージングの主な違い
UAVと比較して、自動車テストにおけるグラウンドトゥルージングは、車両の動きやシステム制約に関するいくつかの利点により、実装が容易です。
- 車両は主に二次元平面で動作します
- 姿勢変化は限定的です(ロール角とピッチ角が小さい)
- スペース、電源、ペイロード容量が制限となることはめったにありません。
これにより、大型で高出力、高精度のグラウンドトゥルーションシステムを車両に比較的容易に統合することができます。.
対照的に、UAVは根本的に異なる条件下で運用されます。
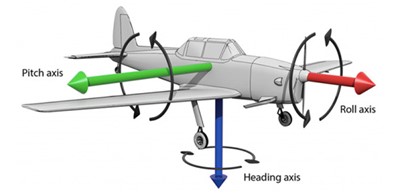
- 連続的3次元、6自由度運動、一定のロール、ピッチ、ヨーの変化を伴う
- 姿勢変化が頻繁で、姿勢誤差が直接的に位置精度に影響する
- 厳格なサイズ・重量・消費電力(SWaP)の制約
これらの要因により、UAV の地上真偽確認は、精度とシステム統合の両面で、著しく困難になります。.
UAVテストにおける「グラウンドトゥルージング」の真の意味
自動車テスト業界のエンジニア、特にADASエンジニアであれば、「グラウンドトゥルージング」という言葉に馴染みがある可能性が高いでしょう。エンジニアリングの文脈では、, グラウンドトゥルース 絶対的な真実を意味するものではありません。むしろ、その誤りが テスト対象システムよりも大幅に小さい, パフォーマンス評価の信頼できるベンチマークにします。.
UAVアプリケーションでは、信頼性の高いグラウンドトゥルージングソリューションは通常、以下を提供する必要があります。
- 途切れのない三次元位置軌跡
- 時間同期された姿勢データ(ロール、ピッチ、ヨー)
- フライト全体の高頻度データ
- 後処理と繰り返し分析のサポート
これらの要素を組み合わせることで、性能評価および誤差解析のための信頼できる参照軌道が作成されます。.
フライトコントロールシステム(FCS)のIMU(慣性計測装置)がグラウンドトゥルージング(地上検証)に使用できない理由
現代のUAVフライトコントローラーは、すでにIMUとGNSSのデータを組み合わせて、位置、速度、姿勢を推定しています。そのため グラウンドトゥルースのために追加のINSが必要なのはなぜですか?
その答えは、フライトコントロールシステム内のIMUとGNSSの設計優先順位にあります。これらのセンサーは以下に最適化されています。
- 飛行安定性を維持する
- リアルタイム制御要件を満たす
- 許容可能な運用範囲内での航法精度の提供
それらは高精度な参照システムとして機能するように設計されていません。実際には:
- IMUのエラーは、積分ドリフトにより時間とともに蓄積します
- GNSS の更新レートは比較的低いです。
- これらの2つのセンサーフュージョンは、最大精度ではなく、制御の堅牢性に合わせて調整されています
INSは、高度なフィルタリングアルゴリズムを使用してIMUとGNSSを緊密に結合することで、これらの限界を克服します。これにより、高ダイナミックな条件下でも、安定した途切れのない正確な位置と姿勢の出力を可能にします。.

GNSS/INS を使用した正確な UAV 地上真実検証における 2 つの主な課題
精度要件
グラウンドトゥルージングの基本原則は、検証対象のシステムよりも参照システムが著しく精度が高い必要があるということです。多くのプロフェッショナルなUAVプラットフォームは、デシメートルからメートル単位の測位精度を達成しています。例えば、画像やLiDARペイロードを搭載したオクトコプターは、通常、ホバリング位置決め仕様が+/- 0.5m〜1.5m程度になります。.
そのようなシステムを意味のある形で検証するには、センチメートル級の参照軌道と、同等の精度を持つ姿勢情報が必要です。.
SWaP 制約
車とは異なり、UAVプラットフォームでは追加機器に厳格な制限があります。グラウンドトゥルージングシステムは、以下の条件を満たす必要があります。
- 軽量 質量は持久力と安定性に直接影響します
- コンパクト サイズ制限ペイロード統合
- 低電力 消費電力が直接飛行時間を短縮します
OXTS ソリューション
OXTS xRED:SWaP重視のGNSS/INSデバイス
電力、重量、スペースに余裕がない場合でも、パフォーマンスを妥協することはできません。この超小型デバイスは、グラム、ワット、立方ミリメートルあたりの位置、姿勢、およびモーションデータの精度を最大化するように設計されています。.
主な機能は以下のとおりです。
- センチメートル級の位置決め精度RTKモードで最大1cm、UAV地上図化要件を満たす
- 高精度姿勢出力: GNSS利用可能条件下でロール・ピッチ精度0.02°
- SWaP設計56 x 53 x 10 mmのコンパクトな寸法、わずか39gの重量、4Wの消費電力で、UAVへの統合に最適
- ポストプロセスサポート最適化と非常に一貫性のある参照軌道を生成するための、エンドツーエンドのソフトウェアツールチェーンが含まれています。


