 English
English
 Chinese
Chinese
 German
German
 Japanese
Japanese
 Korean
Korean

Utilizar un GNSS/INS para la georreferenciación precisa de drones es fundamental. El término ‘georreferenciación’ se refiere al medio de utilizar un sistema de referencia, con una precisión suficientemente alta, para probar o validar el rendimiento.
En UAV las aplicaciones se diversifican, la I+D de drones ha ganado un impulso significativo, introduciendo el concepto de "ground truthing" preciso en la industria de los drones. Mientras que la sector automotriz ha establecido una metodología muy madura para la verificación en el terreno, no se puede replicar simplemente para drones.
Este artículo proporcionará una explicación detallada de la verificación sobre el terreno en pruebas de UAV y describirá cómo OXTS puede apoyar en esta área.
Diferencias clave entre la verificación sobre el terreno de vehículos de motor y vehículos aéreos no tripulados
En comparación con los vehículos aéreos no tripulados (VANT), la verificación en tierra en las pruebas automotrices es más fácil de implementar debido a varias ventajas relacionadas con el movimiento del vehículo y las restricciones del sistema:
- Los vehículos operan principalmente en un plano bidimensional
- Las variaciones de actitud son limitadas (ángulos de balanceo y cabeceo pequeños)
- El espacio, el suministro de energía y la capacidad de carga útil rara vez son restrictivos.
Esto hace que sea relativamente fácil integrar sistemas de verificación en tierra grandes, de alta potencia y alta precisión en un vehículo.
Los UAVs, por el contrario, operan en condiciones fundamentalmente diferentes:
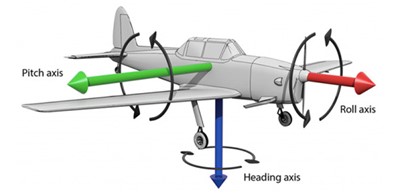
- Movimiento continuo tridimensional de seis grados de libertad, con cambios constantes de balanceo, cabeceo y guiñada
- Cambios de actitud frecuentes, donde los errores de actitud afectan directamente la precisión de la posición
- Restricciones estrictas de tamaño, peso y potencia (SWaP)
Estos factores hacen que la verificación precisa de datos de UAV en tierra sea significativamente más exigente, tanto en términos de precisión como de integración del sistema.
Lo que realmente significa “verificación sobre el terreno” en pruebas de UAV
Si eres un ingeniero en la industria de pruebas automotrices, especialmente un ingeniero de ADAS, es probable que estés familiarizado con el término "ground truthing". En un contexto de ingeniería, verificación sobre el terreno no implica una verdad absoluta. En cambio, se refiere a una referencia cuyos errores son significativamente más pequeño que el del sistema bajo prueba, convirtiéndolo en un punto de referencia fiable para la evaluación del rendimiento.
Para aplicaciones de drones, una solución confiable de verificación en tierra generalmente necesita proporcionar:
- Una trayectoria de posición tridimensional ininterrumpida
- Datos de actitud sincronizados en el tiempo (alabeo, cabeceo, guiñada)
- Datos de alta frecuencia que cubren todo el vuelo
- Soporte para posprocesamiento y análisis repetible
Juntos, estos elementos constituyen una trayectoria de referencia fiable para la evaluación del rendimiento y el análisis de errores.
¿Por qué la IMU de los sistemas de control de vuelo no se puede usar para la verdad del terreno?
Los controladores de vuelo modernos de drones ya combinan datos de IMU y GNSS para estimar la posición, la velocidad y la actitud, por lo que ¿por qué se necesita un INS adicional para la verificación en tierra?
La respuesta reside en las prioridades de diseño de las IMU y GNSS dentro de los sistemas de control de vuelo. Estos sensores están optimizados para:
- Mantener la estabilidad del vuelo
- Cumplimiento de los requisitos de control en tiempo real
- Proporcionar precisión de navegación dentro de los límites operativos aceptables
No están diseñados para actuar como sistemas de referencia de alta precisión. En la práctica:
- Los errores de la IMU (Unidad de Medición Inercial) se acumulan con el tiempo debido a la deriva de integración.
- Las tasas de actualización de GNSS son relativamente bajas
- Estas dos fusiones de sensores están ajustadas para robustez de control, no para máxima precisión.
Un INS supera estas limitaciones acoplando estrechamente la IMU y el GNSS mediante algoritmos de filtrado avanzados. Esto permite salidas de posición y actitud estables, ininterrumpidas y precisas, incluso en condiciones de alta dinámica.

Dos desafíos centrales en el uso de una GNSS/INS para la verdadera validación precisa de drones
Requisitos de precisión
Un principio fundamental de la verificación en tierra es que el sistema de referencia debe ser significativamente más preciso que el sistema que se está probando. Muchas plataformas profesionales de UAV logran precisiones de posicionamiento en el rango de decímetros a metros. Por ejemplo, un octocóptero que transporta cargas útiles de imagen o LiDAR típicamente tendrá una especificación de posicionamiento en vuelo estacionario de alrededor de +/- 0.5m-1.5m.
Para validar tales sistemas de manera significativa, se requiere una trayectoria de referencia a nivel de centímetro con información de actitud igualmente precisa.
Restricciones de SWaP
A diferencia de los automóviles, las plataformas de vehículos aéreos no tripulados (UAV) imponen límites estrictos a cualquier equipo adicional. Un sistema de verificación en tierra debe ser:
- Ligero La masa afecta directamente la resistencia y la estabilidad.
- Compacto límites de tamaño integración de carga útil
- Baja potencia el consumo de energía reduce directamente el tiempo de vuelo
Soluciones OXTS
OXTS xRED: El dispositivo GNSS/INS crítico en cuanto a SWaP
Cuando hay poca potencia, peso o espacio de sobra, pero el rendimiento no puede verse comprometido. Este dispositivo ultracompacto está diseñado para maximizar la precisión de los datos de posición, orientación y movimiento por gramo, vatio y milímetro cúbico.
Las características clave incluyen
- Precisión de posicionamiento a nivel de centímetroHasta 1 cm en modo RTK, cumpliendo con los requisitos de georreferenciación de drones
- Salida de actitud de alta precisiónPrecisión de balanceo y cabeceo de 0.02° en condiciones con GNSS disponible
- Diseño SWaPDimensiones compactas de 56 x 53 x 10 mm, peso de solo 39 g y consumo de energía de 4W, ideal para la integración en UAV.
- Soporte de posprocesamientoCadena de herramientas de software de extremo a extremo incluida, que permite la optimización y generación de trayectorias de referencia altamente consistentes.
Descargar la Hoja de Datos xRED
Obtenga más información sobre las especificaciones de precisión y SWaP que puede esperar del sistema GNSS/INS xRED.


