 Chinese
Chinese
 German
German
 Spanish
Spanish
 Japanese
Japanese
 Korean
Korean

Using a GNSS/INS for accurate UAV ground truthing is critical. The term ‘ground truthing’ refers to the means of using a reference system, with sufficiently high accuracy, to test or validate performance.
As UAV applications diversify, UAV R&D has gained significant momentum, bringing the concept of accurate uav ground truthing into the drone industry. While the automotive sector has established a highly mature methodology for ground truthing , it cannot be simply replicated for drones.
This article will provide a detailed explanation of ground truthing in UAV testing and outline how OXTS can support in this area.
Key differences between automotive and UAV ground truthing
Compared with UAVs, ground truthing in automotive testing is easier to implement due to several advantages related to vehicle motion and system constraints:
- Vehicles primarily operate in a two-dimensional plane
- Attitude variations are limited (small roll and pitch angles)
- Space, power supply, and payload capacity are rarely restrictive
This makes it relatively easy to integrate large, high-power, high-accuracy ground truthing systems on a vehicle.
UAVs, by contrast, operate in fundamentally different conditions:
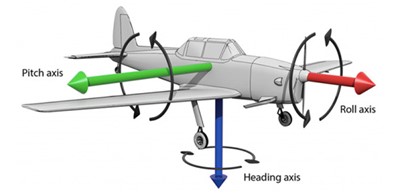
- Continuous three-dimensional, six-degree-of-freedom motion, with constant roll, pitch, and yaw changes
- Frequent attitude changes, where attitude errors directly affect position accuracy
- Strict Size, Weight, and Power (SWaP) constraints
These factors make accurate UAV ground truthing significantly more demanding, both in terms of accuracy and system integration.
What “ground truthing” really means in UAV testing
If you’re an engineer in the automotive testing industry, especially an ADAS engineer, there’s a good chance you’re familiar with the term ground truthing. In an engineering context, ground truthing does not imply absolute truth. Instead, it refers to a reference whose errors are significantly smaller than that of the system under test, making it a reliable benchmark for performance evaluation.
For UAV applications, a reliable ground truthing solution typically needs to provide:
- An uninterrupted three-dimensional position trajectory
- Time-synchronised attitude data (roll, pitch, yaw)
- High-frequency data covering the entire flight
- Support for post-processing and repeatable analysis
Together, these elements make a reliable reference trajectory for performance evaluation and error analysis.
Why the IMU of flight control systems cannot be used for ground truthing
Modern UAV flight controllers already combine IMU and GNSS data to estimate position, velocity, and attitude. So why is an additional INS needed for ground truthing?
The answer lies in the design priorities of the IMU and GNSS inside flight-control systems. These sensors are optimised to:
- Maintain flight stability
- Meeting real-time control requirements
- Providing navigation accuracy within acceptable operational limits
They are not designed to act as high-accuracy reference systems. In practice:
- IMU errors accumulate over time due to integration drift
- GNSS update rates are relatively low
- These two sensor fusions are tuned for control robustness, not maximum accuracy
An INS overcomes these limitations by tightly coupling IMU and GNSS using advanced filtering algorithms. This enables stable, uninterrupted, and accurate position and attitude outputs, even under high-dynamic conditions.

Two core challenges in using a GNSS/INS for accurate UAV ground truthing
Accuracy Requirements
A fundamental principle of ground truthing is that the reference system must be significantly more accurate than the system being tested. Many professional UAV platforms achieve positioning accuracies in the decimetre-to-metre range. For example, an octocopter carrying imaging or LiDAR payloads will typically have a hover-positioning specification of around +/- 0.5m-1.5m.
To validate such systems meaningfully, a centimetre-level reference trajectory with equally precise attitude information is required.
SWaP Constraints
Unlike cars, UAV platforms place strict limits on any additional equipment. A ground truthing system must be:
- Lightweight: mass directly affects endurance and stability
- Compact: size limits payload integration
- Low power: power consumption directly reduces flight time
OXTS Solutions
OXTS xRED: The SWaP-critical GNSS/INS device
When there’s little power, weight, or space to spare – but performance can’t be compromised. This ultra-compact device is engineered to maximise position, orientation, and motion data accuracy per gram, watt and cubic millimetre.
Key features include:
- Centimetre-level positioning accuracy: Up to 1 cm in RTK mode, meeting UAV ground truthing requirements
- High-precision attitude output: Roll and pitch accuracy of 0.02° under GNSS-available conditions
- SWaP design: Compact dimensions of 56 x 53 x 10 mm, weight of just 39 g, and power consumption of 4W, ideal for UAV integration
- Post-processing support: End-to-end software toolchain included, enabling optimisation and generation of highly consistent reference trajectories
Download the xRED Datasheet
Learn more about the accuracy and SWaP specifications you can expect from the xRED GNSS/INS.


