 English
English
 Chinese
Chinese
 Spanish
Spanish
 Japanese
Japanese
 Korean
Korean

Die Verwendung eines GNSS/INS für die genaue Feldprüfung von UAVs ist entscheidend. Der Begriff ‘Feldprüfung’ bezieht sich auf die Verwendung eines Referenzsystems mit ausreichend hoher Genauigkeit zum Testen oder Validieren der Leistung.
Als UAV Anwendungen sich diversifizieren, hat die UAV-Forschung und -Entwicklung erheblich an Dynamik gewonnen und das Konzept der genauen UAV-Bodenabgleichung in die Drohnenindustrie gebracht. Während die Automobilsektor hat eine hochentwickelte Methodik für die Feldvalidierung etabliert, sie ist nicht einfach auf Drohnen übertragbar.
Dieser Artikel wird eine detaillierte Erklärung des Ground Truthings bei UAV-Tests liefern und darlegen, wie OXTS diesen Bereich unterstützen kann.
Wesentliche Unterschiede zwischen bodengestützter Verifizierung von Automobil- und UAV-Systemen
Im Vergleich zu UAVs ist das Ground-Truthing im Automobiltest einfacher zu implementieren, da es mehrere Vorteile in Bezug auf Fahrzeugbewegung und Systembeschränkungen bietet:
- Fahrzeuge bewegen sich hauptsächlich in einer zweidimensionalen Ebene
- Die Lagewinkel sind begrenzt (kleine Roll- und Nickwinkel)
- Platz, Stromversorgung und Nutzlastkapazität sind selten einschränkend
Dies erleichtert die Integration großer, leistungsstarker und hochpräziser Bodenkontrollsysteme auf einem Fahrzeug.
UAVs hingegen agieren unter grundlegend anderen Bedingungen:
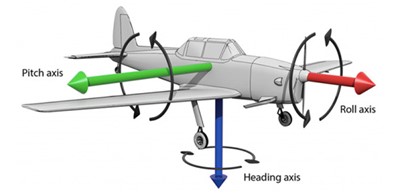
- Kontinuierliche dreidimensionale Bewegung mit sechs Freiheitsgraden, mit konstanten Roll-, Nick- und Gieränderungen
- Häufige Haltungsänderungen, bei denen Haltungsfehler die Positionsgenauigkeit direkt beeinflussen
- Strikte Größen-, Gewichts- und Leistungsbeschränkungen (SWaP)
Diese Faktoren machen eine genaue Bodenüberprüfung durch UAVs deutlich anspruchsvoller, sowohl in Bezug auf die Genauigkeit als auch auf die Systemintegration.
Was “Ground Truthing” bei UAV-Tests wirklich bedeutet
Wenn Sie Ingenieur in der Automobiltestbranche sind, insbesondere ein ADAS-Ingenieur, sind Sie wahrscheinlich mit dem Begriff Ground Truthing vertraut. Im technischen Kontext, grundlegende Wahrheitsfindung bedeutet keine absolute Wahrheit. Vielmehr bezieht es sich auf einen Bezugspunkt, dessen Fehler deutlich kleiner als die des zu testenden Systems, um es zu einem zuverlässigen Maßstab für die Leistungsbewertung zu machen.
Für UAV-Anwendungen benötigt eine zuverlässige Ground-Truthing-Lösung normalerweise Folgendes:
- Eine ununterbrochene dreidimensionale Positionsbahn
- Zeitsynchronisierte Lageregelungsdaten (Roll-, Nick-, Gierwinkel)
- Hochfrequenzdaten für den gesamten Flug
- Unterstützung für Nachbearbeitung und wiederholbare Analysen
Zusammen ergeben diese Elemente eine verlässliche Referenzbahn für Leistungsbewertung und Fehleranalyse.
Warum die IMU von Flugsteuerungssystemen nicht für Ground Truthing verwendet werden kann
Moderne UAV-Flugsteuerungen kombinieren bereits IMU- und GNSS-Daten zur Schätzung von Position, Geschwindigkeit und Haltung. Warum wird für die Bodenwahrheitsfindung ein zusätzlicher INS benötigt?
Die Antwort liegt in den Designprioritäten der IMU und GNSS innerhalb von Flugsteuerungssystemen. Diese Sensoren sind optimiert für:
- Flugstabilität aufrechterhalten
- Anforderungen an die Echtzeitregelung erfüllen
- Bereitstellung einer Navigationsgenauigkeit innerhalb akzeptabler Betriebsgrenzen
Sie sind nicht als hochpräzise Referenzsysteme konzipiert. In der Praxis:
- IMU-Fehler akkumulieren sich über die Zeit aufgrund von Integrationsdrift
- GNSS-Aktualisierungsraten sind relativ niedrig
- Diese beiden Sensorfusionen sind auf Steuerungsrobustheit abgestimmt, nicht auf maximale Genauigkeit.
Ein INS überwindet diese Einschränkungen, indem es IMU und GNSS mithilfe fortschrittlicher Filteralgorithmen eng koppelt. Dies ermöglicht stabile, unterbrechungsfreie und genaue Positions- und Lageregelungsausgaben, selbst unter dynamischen Bedingungen.

Zwei Kernherausforderungen bei der Verwendung eines GNSS/INS für eine genaue Bodenprüfung von UAVs
Genauigkeitsanforderungen
Ein Grundprinzip der Bodenverifikation ist, dass das Referenzsystem deutlich genauer sein muss als das zu prüfende System. Viele professionelle UAV-Plattformen erreichen Positionierungsgenauigkeiten im Dezimeter- bis Meterbereich. Beispielsweise hat ein Oktokopter, der Bildgebungs- oder LiDAR-Nutzlasten trägt, normalerweise eine Schwebe-Positionierungsspezifikation von etwa +/- 0,5 m bis 1,5 m.
Um solche Systeme sinnvoll zu validieren, ist eine Referenzbahn im Zentimeterbereich mit ebenso präzisen Lageinformationen erforderlich.
SWaP-Beschränkungen
Im Gegensatz zu Autos setzen UAV-Plattformen strenge Grenzen für zusätzliche Ausrüstung. Ein Ground Truthing System muss:
- Leicht Masse wirkt sich direkt auf Ausdauer und Stabilität aus
- Kompakt Größenbeschränkungen für Payload-Integration
- Niedriger Stromverbrauch Der Stromverbrauch reduziert direkt die Flugzeit
OXTS Lösungen
OXTS xRED: Das SWaP-kritische GNSS/INS-Gerät
Wenn wenig Leistung, Gewicht oder Platz zur Verfügung stehen – aber keine Kompromisse bei der Leistung eingegangen werden können. Dieses ultra-kompakte Gerät wurde entwickelt, um die Genauigkeit der Positions-, Orientierungs- und Bewegungsdaten pro Gramm, Watt und Kubikmillimeter zu maximieren.
Hauptmerkmale sind:
- Zentimetergenaue Positionierungsgenauigkeit: Bis zu 1 cm im RTK-Modus, erfüllt die Anforderungen der UAV-Bodenvermessung
- Hochpräzise Lageregelungsausgabe: Roll- und Nickgenauigkeit von 0,02° unter GNSS-verfügbaren Bedingungen
- SWaP-DesignKompakte Abmessungen von 56 x 53 x 10 mm, ein Gewicht von nur 39 g und ein Stromverbrauch von 4W, ideal für die Integration in UAVs
- NachbearbeitungsunterstützungEnd-to-End-Software-Toolchain enthalten, die Optimierung und Generierung hochkonsistenter Referenzbahnen ermöglicht
Laden Sie das xRED-Datenblatt herunter
Erfahren Sie mehr über die Genauigkeits- und SWaP-Spezifikationen, die Sie vom xRED GNSS/INS erwarten können.


