 English
English
 Chinese
Chinese
 German
German
 Spanish
Spanish
 Korean
Korean

モバイルマッピングサービスの需要は世界的に高まっており、市場規模は2023年の$317億8000万ドルから、2030年には$897億4000万ドルに達すると予測されています。.
この需要は、モバイルマッピング技術の進歩、エントリーレベルの機器のコスト低下、そしてモバイルマッピングシステムの構築と実装の複雑さを軽減する新しいソリューションなど、いくつかの要因によって推進されています。これにより、機器がより多くの人々の手に渡り、さらにユニークなプロジェクトに使用されるという波及効果が生まれています。.
このブログでは 我々は ためつすがめつ で 九 今後5年間で重要になると思われるモバイル・マッピング・アプリケーション。.
1.スマートシティ
IoTデバイスとそれをサポートするモバイルネットワークの増加は、スマートシティがかつてないほど現実に近づき、モバイルマッピングの素晴らしいユースケースになることを意味する。多くのサービスが各コンポーネントの位置をシステムが把握していることに依存しているため、GISマッピングはこれらのスマート・シティにとって不可欠となるだろう。.
例えば、サイクリストが転倒して負傷した場合を考えてみよう。スマートウォッチは転倒したことを知らせ、バイタルをモニターする。医療補助が必要そうな場合、腕時計は自動的に救急サービスに連絡する。救急車が出動し、歩行者へのルートが自動的に計算される。同時に、救急車が可能な限り迅速に対応できるよう、ルート沿いの信号機が交通整理を行う。.
この例では、システムが期待通りに機能するためには、救急車ステーションとすべての信号機の位置が記載された正確な地図が不可欠である。.
これは、新たなモバイルマッピング技術が極めて重要な分野である。都市部では金属製の高層ビルが大量に存在するため(アーバン・キャニオンと呼ばれる現象)、正確な位置データを取得するのは常に困難だったが、LiDAR Boostなどの新技術により、都市部でも正確な位置データを取得できるようになった。.
2.自律走行車マップ
都市空間の正確な地図を作成できるようになれば、自律走行車の可能性も広がる。ロボットタクシーから自律採掘トラックまで、どのような自律走行車であれ、ナビゲーションを成功させるためには何らかの形の地図が必要だ。そのような地図の作成には、モバイルLiDARのような、どのような環境でも高い精度で動作する測量が必要である。.
これらの地図の主な消費者は自動車メーカーである。地図を自ら作成しようとするところもあるだろうが、自動車メーカーに地図を提供するサービス・プロバイダーの市場が成長する可能性も高い。.
場合によっては、GNSS信号がまったくなくても、これらのマップは正確な測位データを必要とします。自律型マイニングがここで考えるべき主な例です。自律型マイニングトラックがナビゲートするための正確なマップを生成します。自律型ナビゲーションシステムで使用できる方法で鉱山を正確にマッピングすることは、モバイルLiDARを使用して位置推定を支援するLiDAR Boostテクノロジーの理想的なユースケースです。.
3.資産管理
広範囲に分散した多数の資産を管理する資産運用会社は、特に不動産が広大な地域に点在している場合に、モバイルマッピング技術から恩恵を受けることができます。モバイルLiDARのようなツールは、会社の資産を地図上に可視化するのに役立ち、意思決定者は資産全体やそれに伴う課題、特に洪水リスクや地盤沈下のような地理的要因による課題をより広く把握することができます。.
モバイル・マッピングは、ケーブル網や配管などのインフラ資産の管理にも特に有効です。地中レーダーなどのセンサーと組み合わせることで、モバイル・マッピングは企業のインフラをセンチメートル単位で追跡することができ、予知保全などの活動をより効率的に行うことができる。.
4.道路測量
モバイルLiDARの主な使用例は道路網の測量である。データは様々な用途に利用できる:
- 地図は自律走行車やナビゲーションアプリで利用できる。.
- 地図データと道路の状態に関するデータを融合させることで、ドライバーの混乱を減らし、道路作業員の安全を向上させ、道路閉鎖を最小限に抑えるために、道路の予測保守を実施することができる。.
- このデータは、私たちの顧客であるパンプロ社のように、安全性を向上させるために道路設計に役立てることもできる。.
ロードマップ作成に関して言えば、, それは モバイルマッピング設定が不可欠です できる 時間の経過によるドリフトを補正し、それを維持する。 正確 何百マイルも離れた場所でも。. もちろん、道路がトンネルを通ったり、GNSS信号が制限されている都市に入ったりする場合も同様だ、, 君は これらの課題を補うことができるセットアップが必要です。.
外部データロガーへのデータ出力機能も、収集するデータ量(特にLiDARスキャンを実行する場合)を考慮すると不可欠です。.

5.レールマッピング
鉄道マッピングは、道路マッピングと同様の応用と課題を持ちますが、いくつかのユニークな角度があります。鉄道マッピングでは、車庫/プラットフォーム管理、線路、トンネル、橋梁の予知保全が、正確なマッピングデータを取得することで鉄道事業者が享受できる主なメリットですが、それは列車自体からリアルタイムで位置データを取得できることが前提となります。列車にモバイルマッピングペイロードを搭載することで、そのルートに沿ってデータを収集でき、技術者は路線とその周辺インフラの状態を継続的に監視できます。また、技術者が線路上で直接作業する必要性が減るため、鉄道作業員の安全も向上します。.
レールマッピングの課題は、使用する車両モデルにある。すべてのモバイルマッピングのセットアップには、カルマンフィルターとして知られるアルゴリズムがあり、これは全体の位置計算から誤ったデータを特定し、除去するのに役立つ。これには、ペイロードが取り付けられている車両に基づく一連のルールが含まれる。例えば、自動車でマッピングを行う場合、カルマンフィルターには、自動車が前方や後方に移動することなく横方向に移動したことを意味するデータは不正確でなければならないというルールが含まれている。課題は、列車は自動車とは異なる動きをするということだ。.
列車は加速が非常に遅いが、最高速度は非常に速い。また、固定されたリアアクスルと動くフロントアクスルではなく、両方が回転する2つのボギーがあるため、自動車とは旋回方法が異なる。重要なのは、列車を8の字走行させることができないことだ。これは、モバイル・マッピング・ペイロードのIMUを初期化するために必要な一般的な操作である。.
OXTSは、このような課題を解決する鉄道地図ソリューションを開発するため、いくつかの異なるパートナーと協力し、鉄道用の高精度な位置特定データを提供しています。私たちと一緒にこの課題に取り組むことに興味がある方は、以下までご連絡ください。 ご連絡.
6.地理的調査
モバイルマッピングの最もシンプルな用途は、地図を作成することだろう。地理測量、つまり地図製作は、モバイルマッピングの主要なユースケースであり、地図製作者に、これまで以上に詳細で正確な地図を作成する機会を提供するからだ。.
地理測量士は、GNSS信号が制限されている環境での作業や、長距離での精度維持など、他のモバイルマッパーと同じような課題に直面している。GNSS信号が限られた環境での運用、長距離での精度維持などだ。例えば、Ordnance Surveyは、その目的を達成するために、車両全体にモバイルLiDARを装備する必要がありました。このためには、商業的にもデータ処理の観点からもスケーラブルなソリューションが必要でした。.
私たちの仕事についてもっと読む オルドナンス・サーベイ
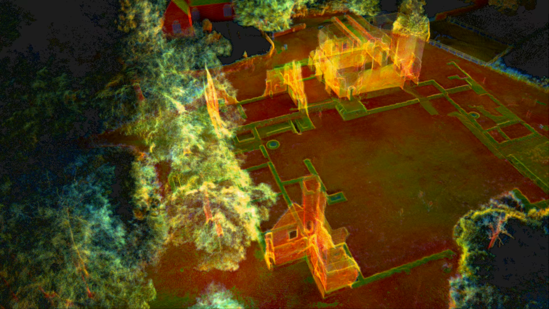
7.考古学的調査
地面の地図を作ることから、地中に埋まっているものを見つけることまで、考古学的調査もまた、モバイル・マッピング・テクノロジーがエキサイティングな進歩を促している分野である。特に, LiDARによる航空測量が発見する世界 このデータを武器に、考古学者は新しいデータや遺物を発見できる可能性がこれまでよりはるかに高い発掘場所を選ぶことができる。埋もれていた古代文明の「地図」を見ることができるようになったことで、古代文明の複雑さや規模に関する新たな発見も生まれている。.
考古学のためのモバイルマッピングで重要なのは、2つのセンサー間のフュージョンの精度であることは明らかだ。LiDARセンサーは何百万ものデータポイントを生成しますが、最大限の価値を提供するためには、その全てに正確な位置を与える必要があります。この種の作業のためにペイロードを構築するモバイルマッパーは、OXTS Georeferencerのようなツールによって、LiDARと位置データを組み合わせるプロセスを、これまでよりもはるかに簡単かつ正確に行うことができます。.
考古学のためのモバイルマッピングを考えるとき、フォームファクターも重要である。y. 考古学調査は、空中、道路、あるいは徒歩でも実施できます。測位システムは は複数の環境で機能するため、はるかに高い価値を提供できる。例えばOXTS xNAV650は、車やバックパックに取り付けることができる、, a 飛行機 またはドローンでも同様に簡単に。.
詳細はこちら OXTSジオリファレンス
8.デジタル建設
建設プロジェクトにおける最大の課題のひとつは、工期と予算を確実に守ることである。建設現場のGISマッピングは、2つの方法でこれらの問題を管理するのに役立ちます。第一に、着工前に現地を正確に調査することで、建設プロセスに影響を及ぼす可能性のある問題や、建築家が説明する必要のある問題を発見することができる。.
第二に、建設が進むにつれて、定期的に現場を調査し、図面と比較することで、図面との一致を確認することができる。図面がBIM(ビルディング・インフォメーション・モデリング)システムにアップロードされていれば、このプロセス全体をデジタルで管理することができる。.
おまけに、完成したビルの正確な地図は、ビルそのもののデジタル・ツインに変換できる。このツインは、ビルに組み込まれたセンサーからの出力、エネルギー消費情報、電球の交換が必要かどうか、どの会議室が空いているかなど、ビルに関するリアルタイム情報をビル管理者に示すことができる。これらの情報は、予知保全、ランニング・コストの最適化、建物の耐用年数を通じた効果的な利用の確保に活用できる。.
建設現場のマッピングとなると、主な課題はGNSS信号です。むき出しの金属や屋内スペースが多いため、GNSS信号は正確な位置データとして信頼できない。そのため、代わりにSLAMやリアルタイムセンサーフュージョンなどのソリューションを使用する必要がある。.
9.構造調査
既存の構造物は、修繕が必要かどうかを評価したり、再利用の可能性を評価したりするために、しばしば測量が必要となる。モバイルマッピング、特にドローンマッピングは、こうした用途に理想的なツールである。ドローンは通常、高精度のデータを提供しながら、人間には危険すぎる、またはアクセスできないスペースにナビゲートすることができます。.
デジタル建設の例と同様に、困難な環境での精度が、ここでのモバイルマッピングにおける主要な課題です。例えば、構造物の弱点を特定する場合、修理が効果を発揮するように、それらを正確に特定できる必要があります。. さらに、ドローンを使用する場合は、サイズ、重量、パワー(スワップ)の比率を考慮する必要がある。簡単に言えば最も 正確 システムができます 得る、小さい、, ライト級 に十分なパワーを持つフォーム・ファクター。 一度の充電でミッションを完了する.
モバイル・マッピングのあらゆるユースケースにおいて、汎用性と回復力が鍵となる。
どのようなモバイル地図アプリケーションであれ、成功するペイロードを定義するいくつかの共通点がある。.
GNSS信号が信頼できない複雑な環境では、これまで以上に多くのマッピングが行われています。単純なGNSS/INSソリューションでは、このような環境で要求されるレベルの精度を提供することはできません。一方、屋内測位の専門ソリューションは、信号が十分に強い場合、GNSSベースの測位にスムーズに移行できないことがよくあります。オープンスカイから屋内へのシームレスな移行を可能にするハイブリッドソリューションが必要です。.
OXTSは、様々なフォームファクターと、センサーと位置情報の組み合わせプロセスをスムーズにするツールの数々で、モバイルマッパーが可能性の限界を超えるペイロードを構築するのを長年にわたって支援してきました。.
WayFinder Prime データシートをダウンロード
WayFinder Primeセンサーフュージョンシステムで期待できる仕様について詳しくはこちらをご覧ください。.


