 English
English
 Chinese
Chinese
 German
German
 Spanish
Spanish
 Korean
Korean

この記事では、OXTS RTシリーズGNSS/INSのユーザーが、RTシリーズ製品の精度を最大限に引き出すための正しい構成、初期化、ウォームアップの手順を説明します。.
テストコース(屋外テストトラックや良好なGNSS環境の閉鎖路など)で車両ダイナミクスやADASテストを実施する場合でも、測量・マッピングプロジェクト(道路ベースのモバイルマッピングやLiDAR測量など)に取り組む場合でも、ここで説明するRTシリーズのベストプラクティスワークフローに従うことで、最も信頼性の高いデータを取得し、当社のデバイス使用に自信を持つことができるようになります。.
この記事では、OXTSの主力製品に基づいてすべての説明を行います。 RT3000 v4. 他のモデルをご利用の方もこのガイドを参照でき、違いがある手順については注記いたします。.
1) ハードウェアの取り付け
a. IMUの向き
RTユニット(赤い箱)は通常、水平かつ真直ぐに取り付けられ、車両の座標系に対する傾斜角は5°以内に保たれるべきです。この場合、方向のみを~に指定すればよい IMUの向き インターフェース。その後のウォームアッププロセスでこのエラーを完全に修正できるため。.
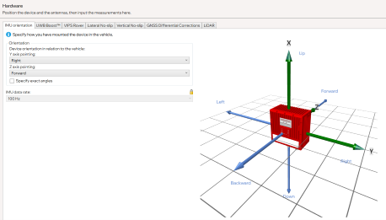
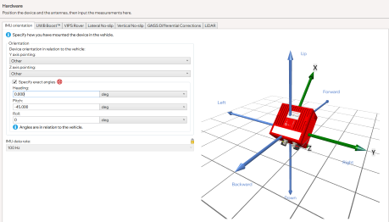
平らに設置できない場合は、スマートフォンの水平器ツールで大体の角度を測り、チク 正確な角度を指定してください, 値を入力し、右側の画像が実際の向きと一致することを確認してください。誤差も5°以内に収める必要があります。.
b. IMUの取り付け安定性
RTユニットと車両の間に相対的な動きがないことが不可欠です。この確認のため、ユニットを3つの並進軸と3つの回転軸、合計6方向すべての方向に揺らしてみてください。デバイスはぐらつきがなく、しっかりと固定されているように感じるはずです。.
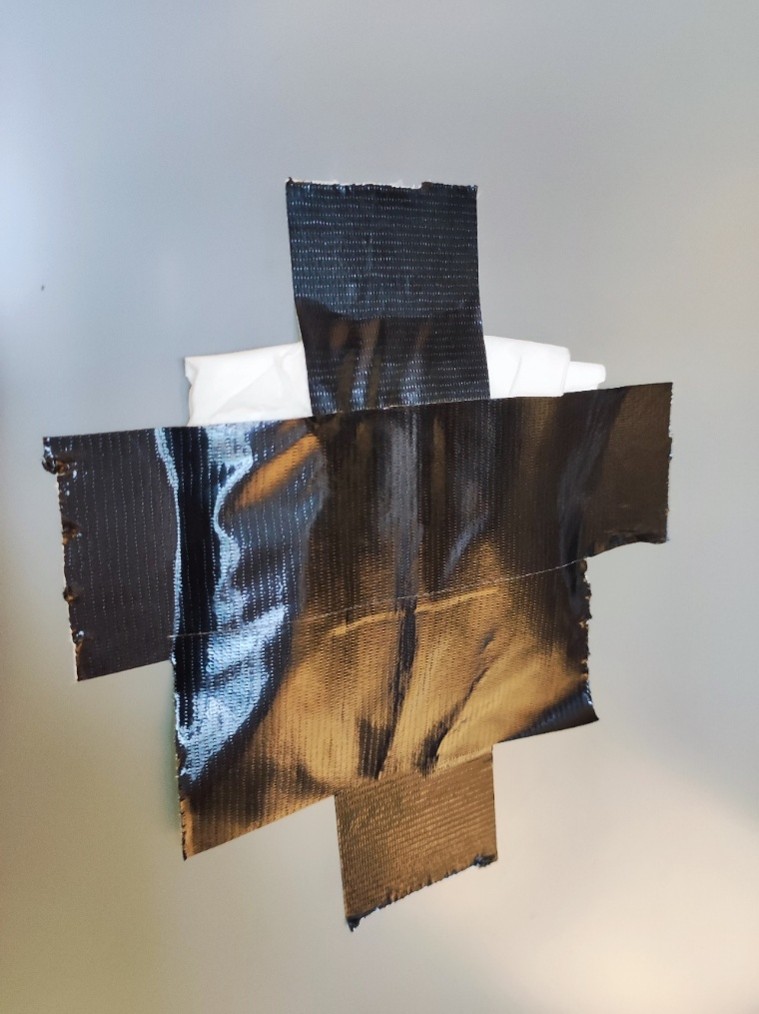
サンルーフのない車両では、RTストラットが通常、ユニットをしっかりと固定します。サンルーフのある車両では、事前にガラス面に適切な布製テープを貼り (必要であればティッシュを下に敷いて)、RTストラットの上面接触点に安定した支持を提供してください。.
c. 正しいデュアルバンドアンテナ設定
デュアルアンテナは低速での方位安定性に不可欠であり、常にデュアルアンテナを使用することを推奨します。アンテナが間違ったポートに接続されていないことを確認してください。便利なヒントとして、各アンテナケーブルの両端に同じ色のテープで印を付けることをお勧めします。.

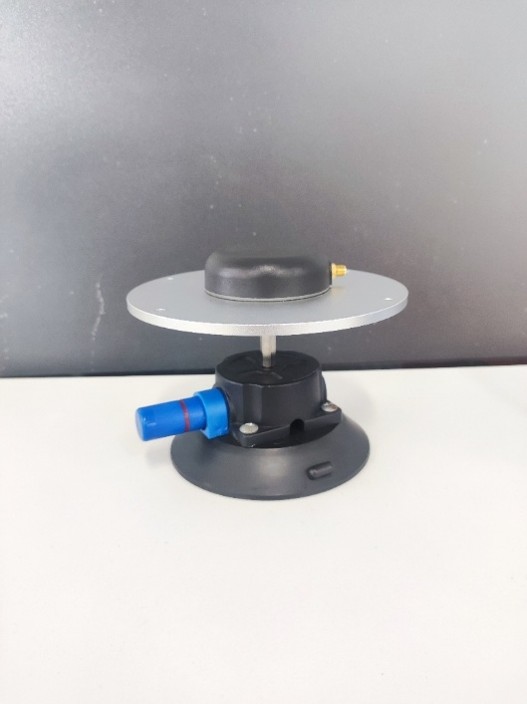
d. 適切なグラウンドプレーンソリューション
ガラスルーフ車両の場合、車室内でのGNSSマルチパス効果を防ぐために、適切なアンテナグラウンドプレーンを使用してください。以下に例を示します。
e. アンテナの配置と間隔
アンテナは、車両の最も高い位置に取り付け、その間に遮蔽物(例:LiDARユニットなど)がないようにしてください。間隔は広いほど良く、理想的には少なくとも1.5m離してください。.
f. 安定した電源供給
12Vまたは24Vの安定した電源を供給してください。車のシガレットライターポートを使用する場合は、スタート/ストップ機能(ICE車)または運転後電源オフ機能(EV車)が無効になっていることを確認してください。不明な場合は、デバイスのFTPログでRDエントリを確認できます。短期間に複数のRDがある場合、デバイスが繰り返し電源オフ/オンされていることを示しており、電源が不安定であることを示唆しています。.
2) 主要なソフトウェア設定
a. 測定対象と方法
測定値の精度を確保する
- デュアルアンテナ間隔精度:within 0.5 cm
- 側方滑りと縦滑り:内部 10センチ
- その他の距離パラメーター:〜以内 10センチ
実践的なヒント:
- デュアルアンテナ間隔:アンテナコネクタからメジャーで直接測定してください。.
- RT-to-ground:RT基準点から車両床面までの距離を測定し、床面から地面までの高さを加算します。.
- アンテナからIMUへ:屋根までの高さを直接測定。前後・左右の距離には、車両投影基準点を使用。.
b. 横滑り・縦滑り設定
これらの設定を完了する必要があります。これらは、RTが車両の真の姿勢を計算するのに役立ち、車両運動テストや、ADASテストでデバイスをハンターとして使用する際に不可欠です。.
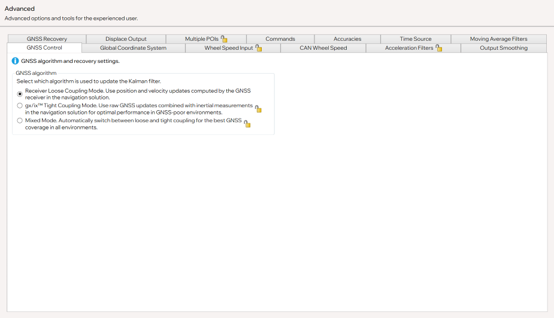
c. GNSS制御
テストトラックユーザーの場合は、現在のバージョンで「レシーバーモード」を選択してください。.
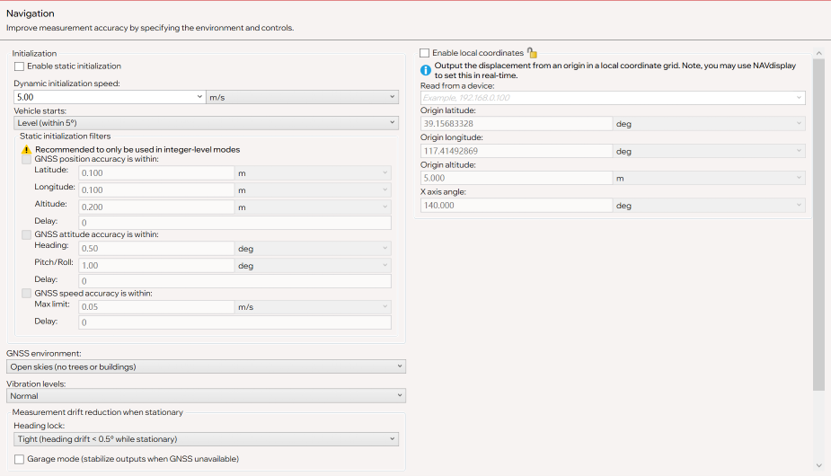
d. 初期化速度
これを 5 m/s に設定することをお勧めします。注: デバイスをまだ初期化しない場合は、車速をこのしきい値未満に保ってください。.
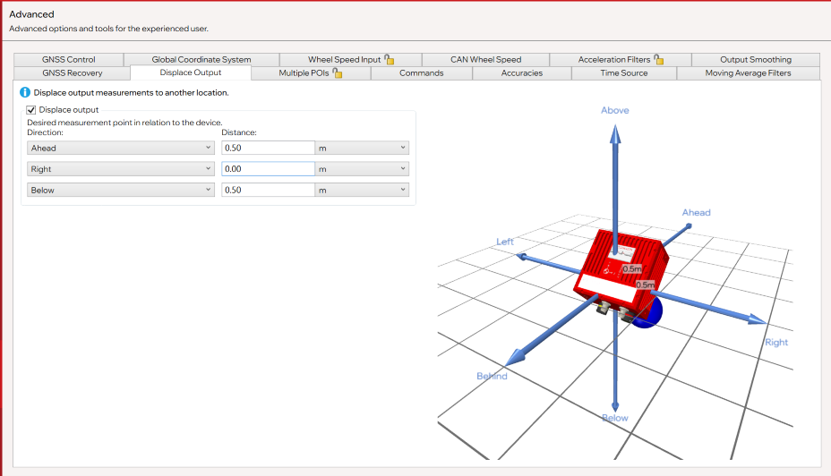
e.displacement output
変位出力により、ユーザーは目標位置を計算できますが、加速度ノイズが増加します(フィルタリングで低減できますが、完全にはなくなりません)。3D距離出力を1.2m未満に保つことをお勧めします。.
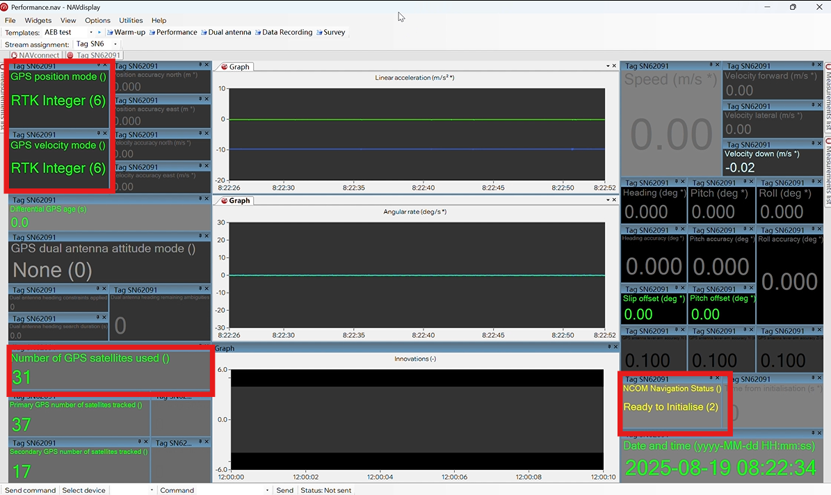
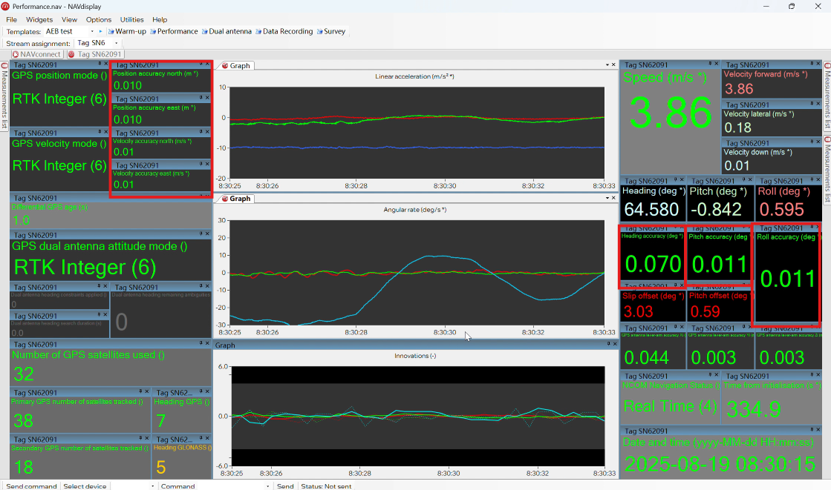
f. セットアップ後の予想されるナビゲーションディスプレイインジケーター
- 衛星数:通常28~34基。受信機モードでは、RT3000 v4は追尾します すべての可視衛星 ただし、最適なもののみを使用してください。「0」が表示されている場合は、 デュアルアンテナテンプレート → 左下隅の「on/ok」でアンテナ接続を確認します。.
- 差分補正が正常に適用されると、左上にはRTK整数が表示されるはずです。.
- デバイスステータス(右側)は初期化準備完了と表示されるべきです。.
3) 初期化とウォーミングアップ
a. 初期化
設定された初期速度(通常22km/h超)を超えるまで直進加速する。.
b. ウォームアップと設定検証
ウォームアップ中、デバイスは3つの主なタスクを実行します。
- IMUのスケールファクタとバイアス(内部パラメータ)をキャリブレーションします。
- RT座標系を車両座標系に合わせます
- IMUのアンテナ相対的な正確な位置を計算します
c. 要求される車両運動性能
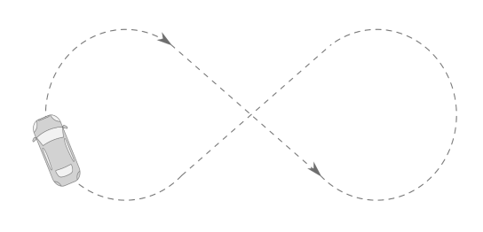
- 八の字を描くように運転してください
- 半径の減少を伴う定速円運動
- 時速30km以上の直線加速度・減速度
- スラローム操作
RT3000 v4の新IMU10テクノロジーにより、通常の走行ダイナミクスでわずか5分で完了します(激しい操作は不要です)。初期化後すぐに最適化が開始されるため、直進加速が完了したら、そのまま走行操作に進んでください。.
旧モデル(RT3000 v3、RT3003、RT3002)では、ウォームアップには15分とよりアグレッシブな運転が必要です。.
d. 設定の確認方法
確認する パフォーマンス → イノベーション 曲線

- 開始時に大きく変動する場合、設定が間違っている可能性があります(例:向きの設定ミス、測定誤差、アンテナの誤接続など)。.
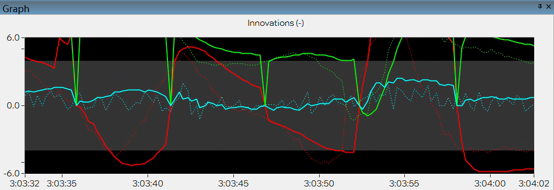
- 特定のダイナミクス下で変動が現れるが、グレーの帯域内に留まる場合は、曖昧さを減らすためにそれらの操作を繰り返してください。.
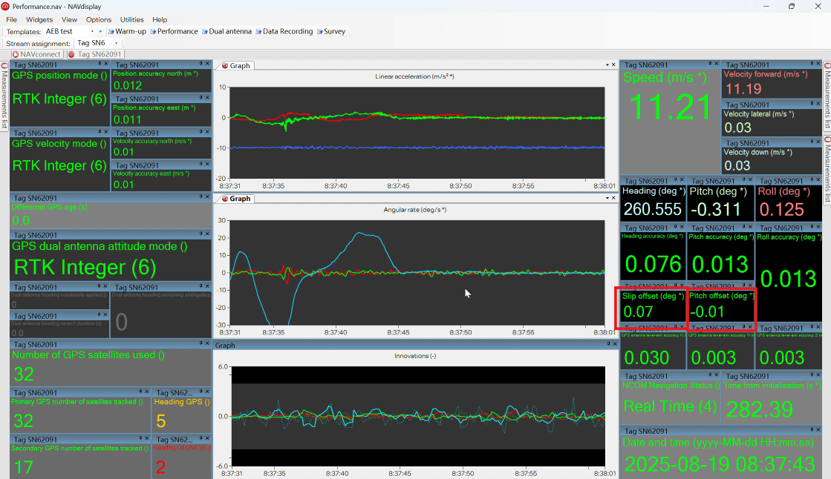
- すべてのダイナミクスにおいて、曲線がゼロ近傍で収束する場合、ウォームアップは成功です。また、赤枠で囲まれたパラメータも確認してください。 パフォーマンス 確認画面。.
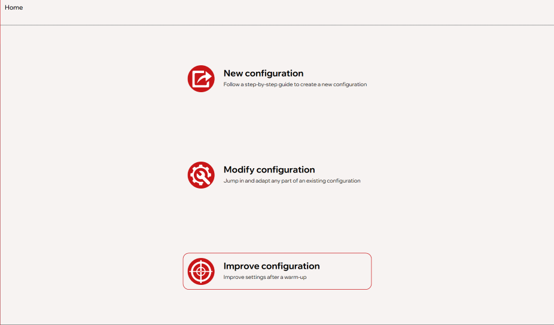
4) 設定の最適化
最適化の目的は、改善されたパラメータをデバイス設定ファイルに書き込むことです。プロセスは、クリックするだけで簡単に実行できます。 次のページ.
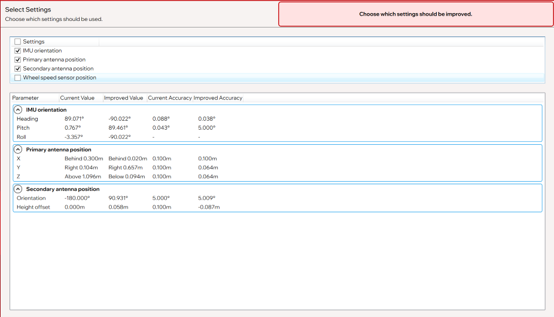
⚠️ 自動車のテストについて:車輪速度センサーが接続されていない場合は、車輪速度のオプションにチェックを入れないでください。最適化が完了すると、デバイスが再起動します。.
向きの調整について
最適化により、ヨー、ピッチ、ヨーが大幅に変更される場合があります。これは、ヨー、ピッチ、ヨーの複数の組み合わせが同じ物理的向きに対応できるため、正常なことです。「ジンバルロック」という用語で検索すると、詳細を確認できます。“
5) ウォームアップ後のテスト
デバイス起動後、初期化とウォームアップを繰り返します。正常な兆候は以下の通りです。
- イノベーション曲線は安定したままです
- 約5分間のダイナミクスの後:
- スリップオフセット < 0.10
- ピッチオフセット\< 0.05
- 精度指標はすべて予測値の範囲内です
この時点で、デバイスは可能な限り高い精度ですべてのデータを測定します。.
よくある二つの質問
- デバイスが大幅に移動された場合はどうなりますか?
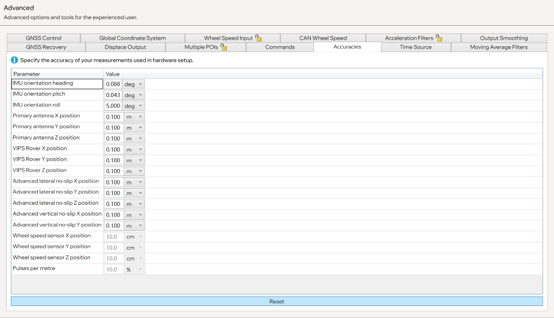
→ 最初から設定をやり直すことをお勧めします。. - デバイスがわずかに移動しただけの場合はどうなりますか?
→ 行く 高度 → 正確性, 、精度をリセットし、このガイドの手順を繰り返します。.
6) RTシリーズベストプラクティス – 最終注記
このガイドでは、RTシリーズデバイスの構成、初期化、ウォームアップを含む、完全な準備ワークフローについて説明します。これらの手順は、しばしば見過ごされがちですが、最終的なデータ精度を決定することがよくあります。.
自動車テストユーザーにとっては、これらの操作によって、車両ダイナミクスとADASテストの結果を正確に保証します。測量・マッピングユーザーにとっては、高品質なGNSS/INS(慣性航法システム)の軌跡と信頼性の高い点群データを保証します。.
この記事全体を通して、各ステップで何を確認すべきかを明確にしようと努めました。これにより、プロセスが正しいかどうかを簡単に確認できます。例えば、
- “この手順は正しそうです
- “これは、前方のステップでの誤りの可能性を示しています。”
慣れてしまえば、これらの手順はわずかな時間で済みますが、大きなメリットをもたらします。テストにおいてもマッピングにおいても、信頼性が高く、管理された、最高の精度を持つ結果が得られます。.
RTユーザーの皆様には、これらの重要な手順に従って練習する時間を取っていただくことを強くお勧めします。ご不明な点がある場合や、ここでカバーされていない状況に遭遇した場合は、遠慮なく お問い合わせ.
ジェレミー・リー
シニアカスタマーサポートエンジニア、OXTS


